



GPU計算を導入した超音波3次元映像化装置
はじめに
超音波探傷において、アレイ探触子を用いた内部欠陥の映像化が普及しつつあります。アレイ探触子とは、複数の小さな駆動素子が規則的に並んだもので、電子スキャン装置を用いて各素子の駆動タイミング(遅延)を変えることで、超音波を任意の方向に送信したり、ある点に集束したりすることができます。一般的な装置は、電子スキャン上の遅延回路で超音波ビームを制御するため、実時間で映像化するために集束点数が限られていたり、大電圧の励振や、バースト波の送信が難しいといった欠点があります。一方、我々の研究室では、電子スキャン装置を使わないアレイ映像化手法を提案しています。これは、基本的には1つの素子で送・受信を行い、この組み合わせを変えながら、全ての送受パターンの波形をPCメモリに記憶していきます。記憶した波形をもとに、PCのポスト処理で遅延処理を行います。これを、全波形サンプリング処理(Full-waveforms Sampling and Processing、FSAP)方式(1)と呼んでいます。振動素子を1列に並べたものを一般にリニアアレイ探触子といい、これは深さ方向における一つの断面を映像化するときに用います。また、振動素子が平面状に配置されたものをマトリクスアレイ探触子といい、これを用いれば、3次元的に分布する欠陥を立体的に映像化することができます。FSAP方式では画素毎に集束ビームを送信し、欠陥を再構成するため、そのポスト処理量は膨大となりますが、我々はGraphics Processing Units(GPU)による汎目的計算技術(GPU計算)を導入することでFSAP方式を高速化しています(2)。また、再構成された欠陥を3次元的に高速表示することも実用上重要です。ここでは、AVS/Expressを用いた3次元欠陥像の例について示します。
2. マトリクスアレイ探触子とFSAP方式の映像化システム
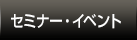
ジャパンプローブ社製のマトリクスアレイ探触子を図1(a)に示します。このアレイ探触子は16 × 16 個の素子を配置しており、総素子数はN=256素子です。このうち、ある1 素子から超音波を送信し、すべての素子で欠陥からの散乱波をそれぞれ受信します(図1(b)は受信波の一例)。すなわち、N2=256×256 個の送受信パターンを保存します。原波形を保存しているので周波数フィルタ等の波形処理等ができ、またパラメータを変えて何度でも映像化をやり直すことが出来るため、探傷結果の保存性や再現性に優れているのが特徴です。
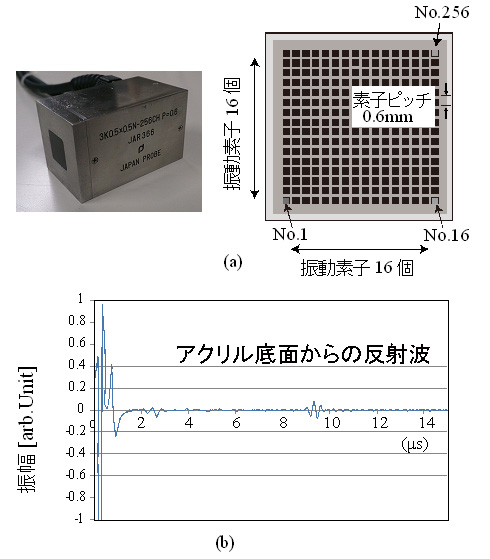
図1:マトリクスアレイ探触子の素子配置(a)と、アクリル底面からの受信エコーの例(b)
FSAP方式による欠陥の映像化の詳細は文献(1)を参考にして頂くとし、映像化の大まかなフローとプロトタイプ機を図2に示します。パルサーレシーバ(ジャパンプローブ社製、JRC-300C)で電気信号の発信と受信を行い、駆動素子のスイッチングはマルチプレクサ(同社製、 MUX-128D)が担当します。レシーバで受信した信号は、CPU側(ホスト)のDynamic Random Access Memory(DRAM)に波形記憶マトリクスとしてストアされ、すべての波形パターンを収録後、PCへ直接コピーされます。次に、PC上でディレイを考慮して各波形を合成し、各画素への集束ビームを計算します。3次元領域を再構成するとなれば計算量は膨大となりますが、ここではGPU計算によって欠陥像合成を行います。上述のように、FSAP方式は1画素毎に集束ビームを作成しますが、ここでは1画素あたりの計算にGPU計算の1スレッドを割り当てています。送受信素子の組み合わせはN2個であるので、GPUデバイス内のメモリアクセス回数はN2、映像化領域の総ボクセル数はK×L×Mであるので、単純に見積もれば欠陥像合成におけるメモリアクセス数は全部でN2×K×L×M 回です。仮にK=L=M=100,N=64とすれば、アクセス回数は約41億回となり、膨大な演算回数となることがお分かり頂けると思います。本システムでは、パルサーレシーバ、マルチプレクサ等のハードウェアの制御、並びに、FSAP方式のGPU計算および3次元画像表示などをナショナルインスツルメンツ社のLabVIEWを用いて一元的に管理しています。
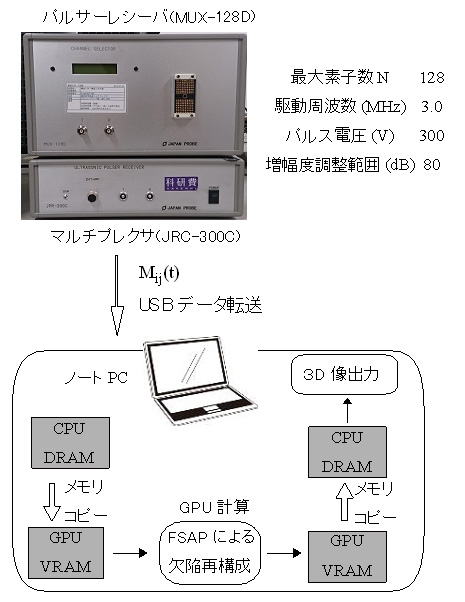
図2:プロトタイプ機における波形取得、GPUによる欠陥再構成、3次元映像化までの流れ
3. FSAP方式による3次元欠陥の映像化例
図3(a)に示すような人工欠陥を設けたアクリル被検体で本システムを検証しました。円筒空洞がアクリルの底面から空けられています。なお、アクリルの縦波音速は2270m/sであり、被検体の高さは10mmです。ここでは、図3(b)に示すように直径と高さの異なる円筒空洞(A, B, C)をターゲットとし、その映像化を試みました。マトリクスアレイ探触子を上面に置き、モデルBとCの中心上に探触子の中心が来るように設置しました。再構成された値は最大値で正規化し、そのうち-1.0から-0.3,0.3から1.0を閾値としてAVS/Expressで表示しています(図3(c))。この結果から、欠陥モデルの天頂部が主として再構成されていることがわかります。また、空洞の側面部については、超音波の反射が得られにくいため、再構成は困難です。
図3:(a)アクリル被検体・人工欠陥の写真、(b)映像化範囲、
(c)AVS/Expressを用いた円筒空洞モデルA, B, C の3次元再構成像
4. まとめ
非破壊検査への応用を意図して、マトリクスアレイ探触子を用いたFSAP方式による欠陥の3次元映像化の事例を示しました。現状では、波形取得、欠陥再構成、3次元映像出力までを一元的に制御するプロトタイプ機を開発しました。映像化の精度については検証済みですが、波形収録に大部分の時間を費やしており、この部分が実用上ボトルネックであることがわかったので、今後は、ハードウエアを高速化する、あるいは精度を維持しつつ波形取得回数を減らす等のソフト的な部分を検討する等、FSAP方式のリアルタイム化を検討していく予定です。
(1) 中畑和之, 平田正憲, 廣瀬壮一, 全波形サンプリング処理方式を利用した散乱振幅からの欠陥再構成, 非破壊検査, Vol.59, No.6, pp.277-283, 2010.
(2) FSAP方式による任意の曲率を有する材料のリアルタイム内部イメージング, 信学技報, Vol. 113, No. 439, US2013-103, pp. 51-54, 2014.
(3) 中畑和之,堀口貴志,高本龍直,超音波マトリクスアレイ探触子を用いたFSAP方式による欠陥の3次元再構成,信学技報, Vol.114, No.464, US2014-98, pp.23-27, 2015.

- 分野別の可視化事例
- ユーザ事例
- POLYGONALmeister によるポリゴン修正と3Dプリント体験
- 幅広い分野で研究成果を3D公開!東京理科大キャンパスレポート(2016年)
- 3D動画で研究成果を公開!東京理科大学オープンキャンパスレポート (2015年)
- GPU計算を導入した超音波3次元映像化装置
- 3Dプリンタ利用体験記
- AVS/Express PCEの時系列データ可視化実験
- 地震時のアースダムの被災メカニズムFEM解析モデル
- 東海大学における国内初10面没入型HoloStageの導入とVR教育事例
- アルミDC鋳造における熱・非弾性FEMモデル解析
- 地震観測網を運用した地震の研究 〜地震被害の軽減を目指して!〜
- 「可視化」でサポート!人工関節術前計画支援システムの開発
- 近年の情報社会におけるコンピュータビジュアリゼーションの研究
- 「ノンフォトと可視化」について
- 「情報可視化」について
- 大規模可視化の時代がやってくる!
- 大型ヘリカル装置LHD中の不安定性のMHDシミュレーション研究
- 流体構造連成解析 旗のはためき現象の高度非線形シミュレーション
- 没入型VRシステム導入事例:中央大学
- コンクリート中を伝搬する超音波の可視化
- データ同化:そのインパクトを3Dで実感する
- スキャニング・ステレオPIVによる軸対称噴流の三次元速度計測
- 河川〜沿岸における流れ・物質輸送の可視化
- 固体推進薬注型時のエックス線による可視化画像解析
- 北見工業大学 情報処理センター様のご紹介
ユーザー教育レポート - 宇宙機タンク内部の液体推進薬挙動
- AVS/Expressにより、イタリア航空宇宙センターにおいて、新たなアプローチが実現
- 設計との誤差を検証するためAVS/Expressのテクノロジーを活用