



近年の情報社会におけるコンピュータビジュアリゼーションの研究
〜視覚効果に着目した高度な画像表現・情報提示技術〜
東京大学大学院新領域創成科学研究科 複雑理工学専攻 高橋 成雄 准教授
ボリュームデータと伝達関数
伝達関数とは、ボリュームレンダリングで中身を可視化するために使う、色と透明度に一回変換する関数です。
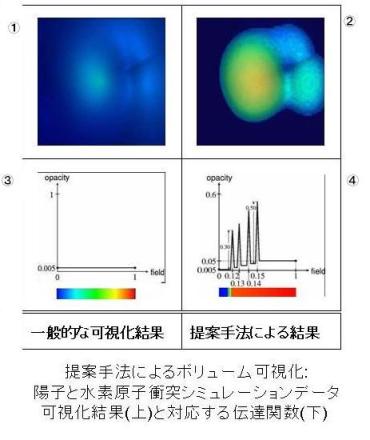
(図2)
図2は、陽子と水素原子の衝突直後のデータです。これに対して、数値データの特徴(分布)を何も考えない伝達関数で可視化すると、真ん中が明るくなる結果になります。(図2-1)
これじゃ、どうしようもないんで、特徴解析したものがこれです。(図2-2)このデータに対して、等値面の閾値を高い値から低くしていくと、2つの球がでてきて、くっついて1回イビツなドーナツを作って、穴となり、最後は穴が埋まって大きな塊になります。こういう形状のトポロジーに関する特徴点をとりだし伝達関数を設定すると、図2-4のような伝達関数が設計できます。
実は、これでシミュレーションした方がいらっしゃって、お見せした時のフィードバックが結構面白く、彼らは、水素原子と陽子がここら辺にあるということは知っていたんですけども、このときにエネルギーがどこを回って戻ってきているっていうのは全然、認識していなかったのですが、これをみて、それがはっきりしたそうです。これは可視化が、人間が普通気付かないような情報をきちんと拾い出して、見えないものをきちんとユーザに提示してくれた一つの例ですね。
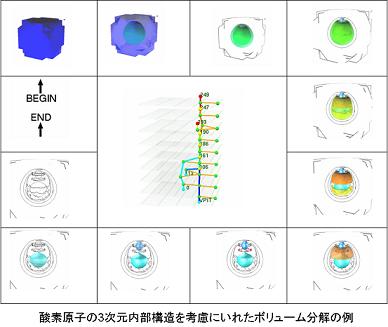
(図3)
図3は、別のボリュームデータの入れ子構造に着目し、分解したものです。
中央のグラフは、等値面のトポロジー変化を示すもので、ここから、この下向きになる部分は片側が入れ子になっていることがわかります。このグラフだけ抽出できれば、入れ子関係が分かるのでこの部分が内側になるんだから、こっちのほうに大きな不透明度を与えてやって、そうすると外側が少しうすく透けていって内側のほうが良く見える、ということができます。
このグラフは操作のインターフェイスになっているので、実際のオブジェクトをクリックしながら順番をかえることもできます。
最適視点と可視化
次は、物を見るときに、どこらみるのがいいのという研究です。
例えば、心理学実験で、凹凸のあるかたちを提示して「どこからみたらいんでしょうね?」と質問をした実験結果があり、そこには法則が存在します。
1つは特徴を重視する法則です。例えば馬は、顔や首や足など特徴部分見えないと馬と判らないですから、それが見える方向を最適な視点と考えます。
2つめは、視点位置が多少変化しても画像が変わらないという法則です。画面をチラチラっと揺らしたときに、劇的に画像が変わってしまう視点は最適と感じません。ぎりぎりで良く見えているのではなく、くるくるって廻したときに、しばらくの間「良いビュー」が続くような場所を良い視点と考えます。
3つめは、たくさんの情報(面)が見えていることです。
ビューエントロピーというものを計算し、その最大値を最適な視点とする考え方があります。
図5の中央は、馬を囲むすべての方向から見た場合に対して、エントリピーを計算し、その値を球面に色でマップしています。上が北半球、下が南半球で、赤いところがいい視点を意味します。
われわれは、これを、さきに紹介した特徴解析を使ってボリュームに拡張しました。
これについては検証のテストをしました。その結果、最適視点の位置は、完全に一致しないですが、その傾向は比較的きれいにシミュレートができ、そこそこ使えるという話になっています。
| <<戻る | 1 | 2 | 3 | 次へ>> |

- 分野別の可視化事例
- ユーザ事例
- POLYGONALmeister によるポリゴン修正と3Dプリント体験
- 幅広い分野で研究成果を3D公開!東京理科大キャンパスレポート(2016年)
- 3D動画で研究成果を公開!東京理科大学オープンキャンパスレポート (2015年)
- GPU計算を導入した超音波3次元映像化装置
- 3Dプリンタ利用体験記
- AVS/Express PCEの時系列データ可視化実験
- 地震時のアースダムの被災メカニズムFEM解析モデル
- 東海大学における国内初10面没入型HoloStageの導入とVR教育事例
- アルミDC鋳造における熱・非弾性FEMモデル解析
- 地震観測網を運用した地震の研究 〜地震被害の軽減を目指して!〜
- 「可視化」でサポート!人工関節術前計画支援システムの開発
- 近年の情報社会におけるコンピュータビジュアリゼーションの研究
- 「ノンフォトと可視化」について
- 「情報可視化」について
- 大規模可視化の時代がやってくる!
- 大型ヘリカル装置LHD中の不安定性のMHDシミュレーション研究
- 流体構造連成解析 旗のはためき現象の高度非線形シミュレーション
- 没入型VRシステム導入事例:中央大学
- コンクリート中を伝搬する超音波の可視化
- データ同化:そのインパクトを3Dで実感する
- スキャニング・ステレオPIVによる軸対称噴流の三次元速度計測
- 河川〜沿岸における流れ・物質輸送の可視化
- 固体推進薬注型時のエックス線による可視化画像解析
- 北見工業大学 情報処理センター様のご紹介
ユーザー教育レポート - 宇宙機タンク内部の液体推進薬挙動
- AVS/Expressにより、イタリア航空宇宙センターにおいて、新たなアプローチが実現
- 設計との誤差を検証するためAVS/Expressのテクノロジーを活用