資料ダウンロード
自律走行車の LiDAR に対する信頼性解析
2021年1月
Google、Tesla、Lyft、Uber などのパイオニア企業が自律走行技術の改良に向けて注力している中で、完全自律走行車の完成はすぐそこにまで近づいています。2017 年の Forbes の記事では、2020 年までに 1000 万台の自動運転車の路面走行が実現すると予測されています。しかし実際には、完全自律走行を実現させる技術の完成に向けた各企業の取り組みを受けても、完全自律走行車の路面走行までの道のりは長いと見られています。ここで 2 つの疑問が生じます。完全な自動運転車の性能を測るユースケースなしに、開発者が LiDAR、レーダー、カメラセンサーなどの技術に確信を持ち、またそれらの技術の動作環境と連携させる方法はあるのでしょうか。具体的には、企業はどのように保証率、信頼性の指標と目標、耐用年数などに関するビジネス上の意思決定を行うことができるのでしょうか。シミュレーションはこれらの疑問を解決します。
自律走行車のLiDARに対する信頼性解析の資料サンプル
Sherlock を使用したシミュレーションプロセスと結果
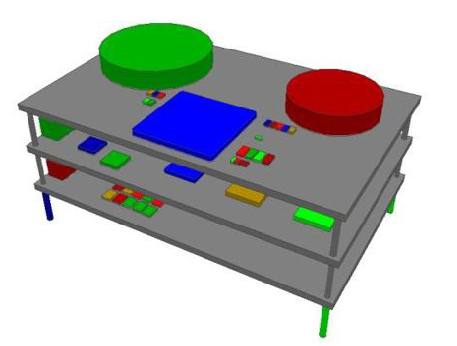
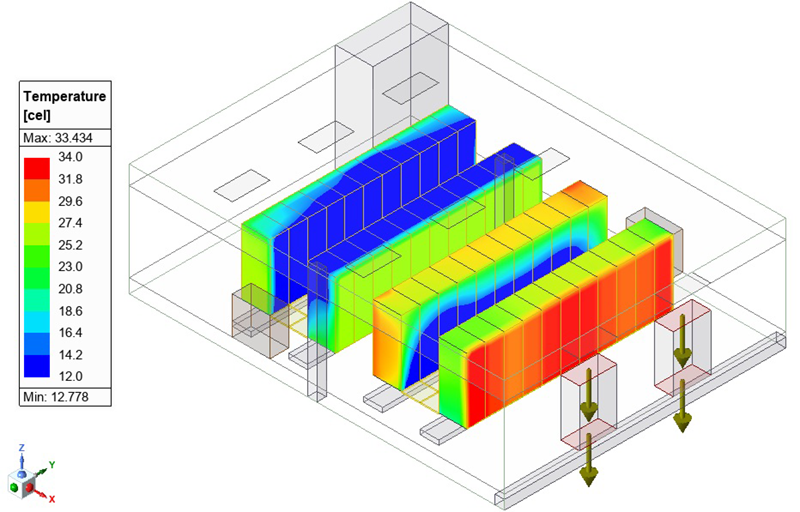
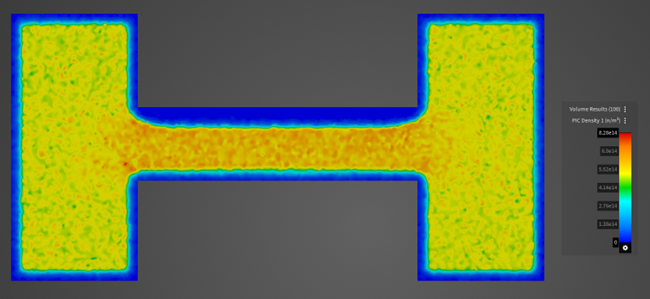
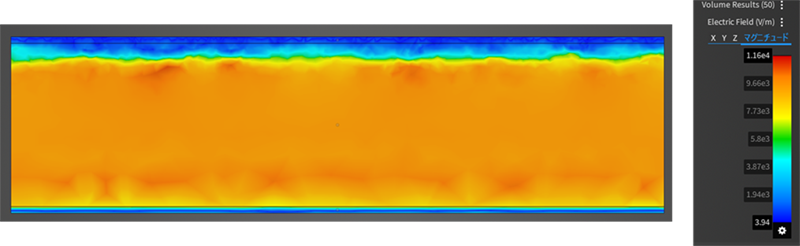
Sherlockを使用して、標準的な業界知識に基づき LiDARアセンブリの完全にメッシングされた 3D CAE モデルを作成しました。Sherlock によって生成された STEP ファイルを CFD ソフトウェアにインポートし、LiDAR アセンブリの 3 層すべての基板について、走行中および停止中のオン状態における温度勾配マップを作成しました。
伝熱解析の実行
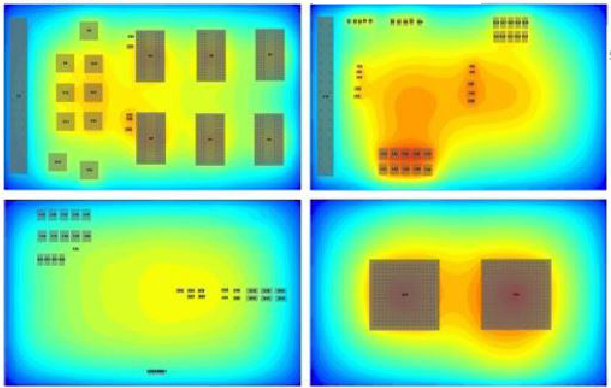
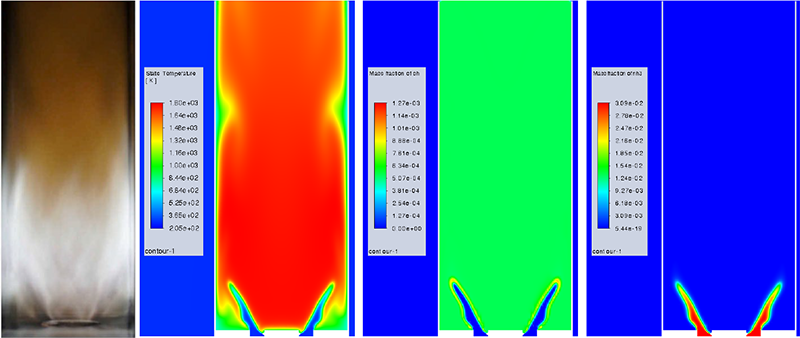
次に、半導体 LiDAR モデルの基板ファイルが CFD ソフトウェアに再度インポートされ、伝熱解析が実行されました。CFD は各パーツに供給電力を適用し、平均走行速度を基準とした空気流れを適用しました。自動車が置かれるさまざまな環境状態を考慮するため、LiDAR のランプ時間の固有/強制対流モード間での変化が仮定されました。
故障確率予測

Sherlock は、これらの損傷メカニズムおよび複合的な磨耗をもとに、時間経過に伴う故障確率 (POF) を予測しました。 ECAD 単独で生成した温度マップでは製品の耐用年数の予測に有効ではありませんが、ECAD ソフトウェアと Sherlock を組み合わせることで有効活用できます。Sherlock は温度マップを解釈して、各磨耗メカニズムをもとに時間経過による POF を効率的に予測することで、最も故障要因となりやすいメカニズムの全体像を示します。この結果に応じて、開発者は設計またはビジネス目標を調整することができます。
関連情報
関連する解析事例
MORE
関連する資料ダウンロード
MORE-
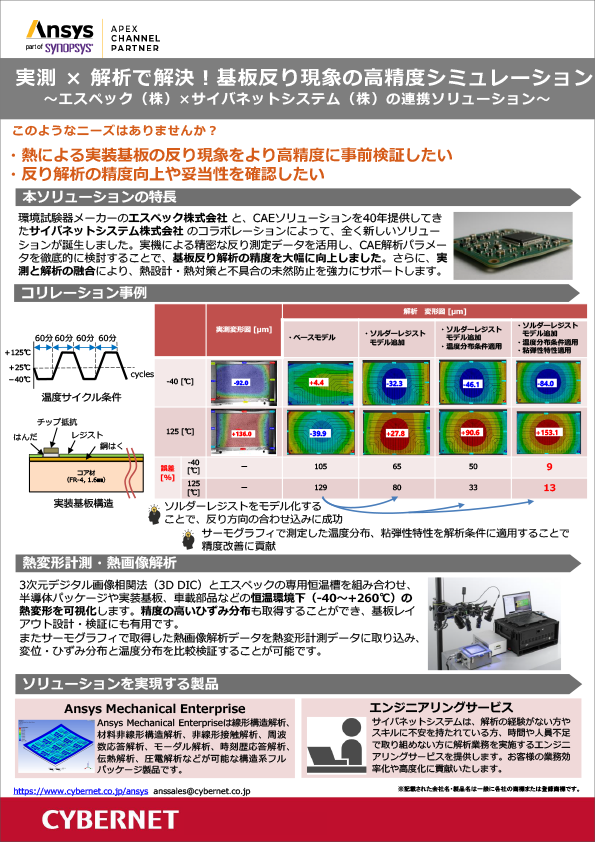
実測 × 解析で基板の熱変形問題を解決!基板反り現象の高精度シミュレーション
~エスペック(株)×サイバネットシステム(株)の連携ソリューション~
-

【全記事】CAEのあるものづくり vol.42
ユーザー様インタビュー記事7件を1冊に集約した保存版
-
誤差との上手なつきあい方 ~流体解析の計算誤差~ (完全保存版)
誤差との上手なつきあい方 前編・後編 を1冊にまとめた保存版 PDF
-
非線形解析の最大強度評価はAnsys LS-DYNAで解決!
~Ansys LS-DYNAで解決!最大荷重評価のボトルネック~
-

事例でご紹介!流体解析分野のエンジニアリングサービス ~解析業務の委託・立ち上げ支援・カスタマイズによる効率化など~
-
はんだ濡れ上がり形状予測解析で電子機器の信頼性向上
~Ansys LS-DYNAで電子機器の信頼性向上に貢献~
-
Ansys ユーザーのための PyAnsys 完全ガイド
Pythonで加速するCAEワークフロー
-
共振回避だけで終わらせない振動解析の進め方を解説(周波数応答・時刻歴まで)
~Ansys Mechanicalで実現する高度な製品開発~