CAEを学ぶ
ローターダイナミクス解析(ろーたーだいなみくすかいせき)
英訳:rotordynamic analysis
ローターダイナミクス解析とは、回転機械の振動のうち「軸曲げ振動」を解析する手法のことです。軸曲げ振動は、回転軸の振動で最も多く問題となる振動で、回転軸の長手方向に変化するたわみ変形モードを保持し、軸に垂直な平面でふれまわる現象のことです。
身近な例では、回転しているコマが傾いて公転する運動(ふれまわり運動)が代表的です。回転しているこまが倒れないのは、倒れを直す方向にジャイロモーメントが働くためで、ジャイロモーメントは回転軸の剛性を変化させます。剛性が変化するため、回転しない構造体の固有振動数と異なります。ローターダイナミクス解析では、この剛性変化の影響を考慮します。
構造物系と回転系の運動方程式の違いを見てみます。
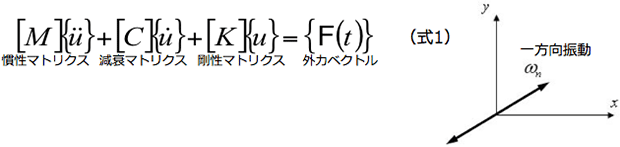
構造物系の運動方程式は以下のとおりです。加振方向と振動方向は同じになります。
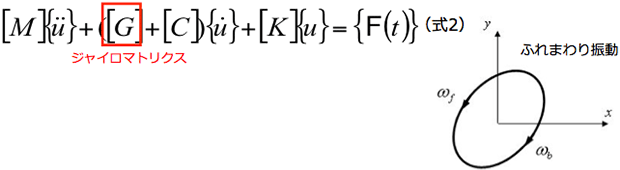
回転系の運動方程式は以下のようにジャイロマトリクスが含まれた形になります。回転軸の回転にともなうジャイロ効果により、平面上をふれまわる運動になります。
回転軸の質量および剛性を無視したコマの微小傾き自由振動について考えてみます。左端をピン支持、軸受としてバネを配置したとします。
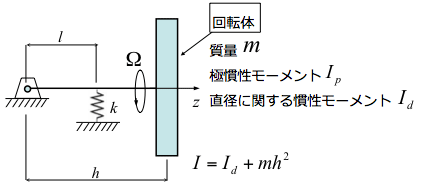
バネ位置における変形量δはθが微小変形の仮定でδ=θlとなり、バネによる復元モーメントはM=k×θl×l=kl 2 θとなります。
慣性モーメント I 、回転体の傾きθ x ,θ y とすると、以下の運動方程式になります。
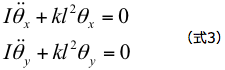
K=kl 2 とおくと、以下のようになります。
回転軸が回転速度Ωで回転している場合、回転による角運動量 I p Ω の方向変化により生じるジャイロモーメントが作用し、以下の運動方程式になります。
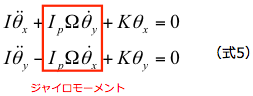
マトリクス形式で表記すると次のようになります。

(式6)より、θ x , θ y の振動は互いに連成していることがわかります。
ここで、XY平面を複素平面として、自由振動解 θ を以下のように仮定します。

(式7)を(式6)に代入します。

(式8)より、固有振動数ω が求まります。
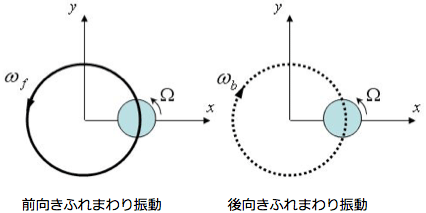
回転軸の回転方向(自転)を正にとり Ω>0 とすれば、正のω f 、負のω b の2つの解が得られます。

このように回転系の固有振動数ω は回転軸の回転速度Ω の関数で変化し、軸の回転方向と同じ前向きふれまわりω f 、逆の後向きふれまわりω b が存在することになります。
CAEでは、回転系の固有振動数ω はジャイロマトリクスを考慮したモーダル解析で求められます。ジャイロマトリクス(減衰)を考慮するため複素固有値ソルバーを使用する必要があります。
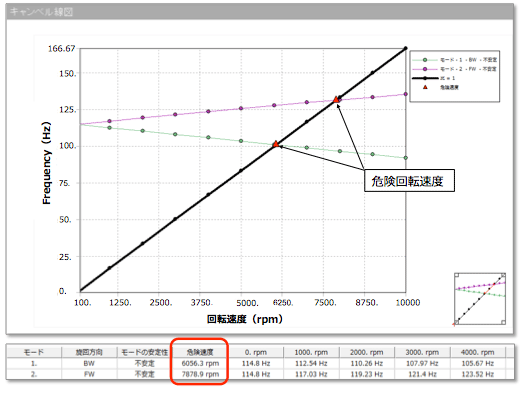
解析を実施すると、キャンベル線図を出力できます。
共振は前向き固有振動数と回転速度の交点で発生し、この回転速度を危険回転速度と呼びます。
Ansysにおける取扱い
- Ansysはローターダイナミクスの解析に対応しています。
モーダル解析以外に、周波数応答解析、時刻歴応答解析にも対応しています。
CAE用語辞典の転載・複製・引用・リンクなどについては、「著作権についてのお願い」をご確認ください。
関連キーワード
関連情報
関連する解析事例
MORE



関連する資料ダウンロード
MORE-
設計者CAEを”使われる仕組み”にするには?
アルパイン設計事務所様に学ぶ、Ansys Discovery 定着の実践事例
-
熱流体システム全体を高速解析ーFlownex Simulation Environmentー
-

金型設計から量産までをIoT生産データでつなぐ一気通貫のものづくり
-
実形状ベースのCAEソリューション
~CTデータを活用した高精度シミュレーション~
-
患者CTデータを治療シミュレーションへ
~個別化医療を支える解析活用ソリューション~
-

繊維系複合材料の異方性線膨張係数の予測
~マルチスケール解析によりプリント配線基板の解析精度を改善~
-

短時間で設計パラメータを評価。上流設計の最適化を「圧倒的な高速化」へ
設計上流における形状検討をより幅広い設計空間で実施
-

解析専任者だけでなく誰でも解析ができる!設計者のための超高速リアルタイム解析
流体解析を専門作業から設計の武器へ