CAEを学ぶ
固有ベクトル(こゆうべくとる)
英訳:eigenvector
固有ベクトルとは、正方行列[A]の固有値λとしたときに、以下の関係が成り立つベクトル{φ}のことです。
モードベクトルや固有モードベクトルと呼ばれることもあります。

CAEでは、主に振動の問題で利用されます。
以下、1次元2自由度系の自由振動問題を例に、固有ベクトルを説明します。
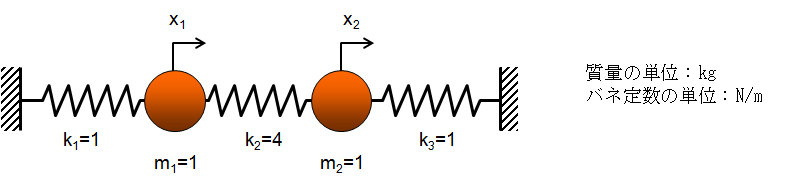
下記の図のように、3本のバネと2つの質点からなるモデルを考えます。
減衰は無視します。
減衰の無い自由振動状態における運動方程式は、一般化運動方程式の減衰項と外力項がない式となります。

質量マトリクスと剛性マトリクスを具体的に書き表します。

質量とバネ定数を代入します。

この運動方程式の固有値を求めることを考えます。
解を求める方法は何通りかありますが、ここでは解の形を以下のようにおきます。

(式5)を(式4)に代入します。

両辺をe jωt で除して、

A 1 ,A 2 は非ゼロですので、以下の行列式

を満たすωが固有値(固有角振動数)です。
小さい順に添え字をつけて、1番目の固有値はω 1 =1、2番目の固有値はω 2 =3 [rad/s] と求まります。
また、固有振動数はf=ω/2πの関係より、f 1 =0.159 , f 2 =0.477 [Hz]となります。
1番目の固有値ω 1 =1を(式7)に代入します。

上式が成り立つには、A 1 =A 2 =1であればよいことは直感的に理解できます。
さらに、A 1 =A 2 =2、あるいはA 1 =A 2 =3でも成り立ちます。
つまりA1とA2の比が A 1 :A 2 =1:1であれば上式は成り立ちます。
このように比を表したものを固有ベクトルと呼び、通常{φ}と表します。
ここでは1番目の固有値に対する固有ベクトルなので{φ 1 }と表します。

同様に、2番目の固有値ω 2 =3より、2番目の固有ベクトルも求まります。

この固有ベクトルで表される形状を固有モードと呼びます。
CAEのモーダル解析では、上記のように固有値と固有ベクトルを計算しています。
固有ベクトルは比率を表すだけですので、モーダル解析結果で得られる変位などの固有モード情報は比率だけが正確で、絶対値に物理的意味は無いことに注意が必要です。
実際に同じモデルでモーダル解析を実施して確かめてみます。
解析で得られた固有振動数は、手計算と一致していることが確認できます。

1次モードは、2つの質点が同方向に同じ変位量となっており、固有ベクトルφ 1 で示されたとおりになっています。
2次モードは2つの質点が逆方向に同じ変位量となっており、こちらも固有ベクトルφ 2 で示されたとおりになっています。

1次モード
2次モード
繰り返しになりますが、固有モードは比率のみを表すため、上記結果の変位量も比率のみ正確で、絶対値に物理的な意味はありません。
CAE用語辞典の転載・複製・引用・リンクなどについては、「著作権についてのお願い」をご確認ください。
関連キーワード
関連情報
関連する解析事例
MORE
関連する資料ダウンロード
MORE-
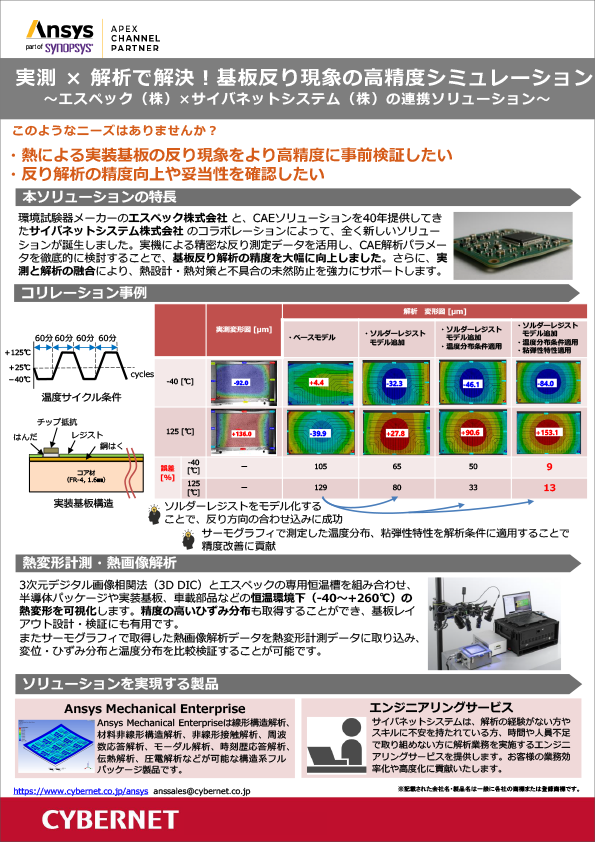
実測 × 解析で基板の熱変形問題を解決!基板反り現象の高精度シミュレーション
~エスペック(株)×サイバネットシステム(株)の連携ソリューション~
-

【全記事】CAEのあるものづくり vol.42
ユーザー様インタビュー記事7件を1冊に集約した保存版
-
誤差との上手なつきあい方 ~流体解析の計算誤差~ (完全保存版)
誤差との上手なつきあい方 前編・後編 を1冊にまとめた保存版 PDF
-
非線形解析の最大強度評価はAnsys LS-DYNAで解決!
~Ansys LS-DYNAで解決!最大荷重評価のボトルネック~
-

事例でご紹介!流体解析分野のエンジニアリングサービス ~解析業務の委託・立ち上げ支援・カスタマイズによる効率化など~
-
はんだ濡れ上がり形状予測解析で電子機器の信頼性向上
~Ansys LS-DYNAで電子機器の信頼性向上に貢献~
-
Ansys ユーザーのための PyAnsys 完全ガイド
Pythonで加速するCAEワークフロー
-
共振回避だけで終わらせない振動解析の進め方を解説(周波数応答・時刻歴まで)
~Ansys Mechanicalで実現する高度な製品開発~