解析事例
Ansys HFSS SBR+ソルバーによるミリ波レーダーのドップラーレンジ解析
こんな方におすすめ
- 実際の走行状況や道路環境を考慮したミリ波レーダーの解析を行いたい方
- 効率の良いミリ波レーダーの性能評価をされたい方
ミリ波レーダーの性能評価に関する課題
ADASと自動運転を実現する代表的なデバイスであるミリ波レーダーの設計・開発においては、いかに効率よくレーダーの性能評価ができるかが重要となります。計算機シミュレーションによるレーダーの性能評価はその課題を解決するアプローチの一つですが、車載用レーダーに適用される周波数帯 (例:77GHz)が非常に高いため、超大規模な電磁界解析を実施する必要があり、計算コストが膨大になります。Ansys HFSS SBR+ソルバーはレイトレーシング法計算アルゴリズムにより、 波長の数十倍から数千倍のサイズを持つ電気的に大規模な構造物に対して設置されたアンテナの特性(アンテナパターン、近傍界、アンテナ間結合等)を高精度かつ高速に解析いたします。
解析概要
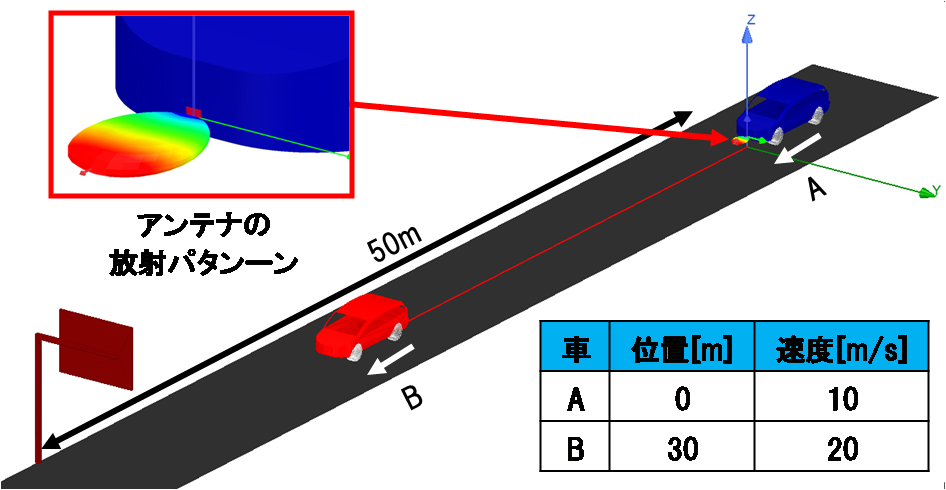
図1. 自動車、標識および道路を含む解析モデル
ミリ波レーダーの性能を評価するため、図1のような環境下において秒速10mおよび秒速20mで走行する車Aおよび車Bにおけるドップラーレンジ解析を行います。車Aに搭載するレーダーは送受信アンテナともに路面から0.5mの高さに設置し、送受信アンテナの放射特性は水平方向に60°および垂直方向に15°の広がりを持つ理想的なパターンを使用します。
解析結果
図2. レーダーから見た距離に対する相対速度
横軸を車Aとレーダーの測定対象物(車B-図2下および標識-図2上)の距離(Range)とし、縦軸を車Aと対象物との相対速度(Doppler Velocity)とした場合のドップラーレンジ解析の結果(コンター図)を図2に示します。縦軸の秒速10m上で図中の右から左に動いている様子が標識に対する特性です。一方、縦軸の秒速-10m上で図中の左から右へ動いている様子が車Bに対する特性となります。車Aが初期位置(図1の位置)にある場合、標識の位置は固定で距離は50mです。車Aの速度が秒速10mであるため、コンター図上では相対速度が秒速10mの位置で、時間経過とともに車Aと標識の距離が縮まっているのが確認できます。車Bは秒速20mと車Aの秒速10mより早く移動するため、相対速度が秒速-10mの位置で、車Aと車Bの距離が広がっていくのが確認できます。
図3. レイトレースの可視化
図3に本評価の直接波や反射波を示すレイの可視化の結果を示します。Ansys HFSS SBR+ソルバーを使うことにより、レイを可視化も同時に行え、ミリ波レーダーにおけるドップラーレンジ解析をより効果的に行えます。
効果
Ansys HFSS SBR+ソルバーを使うことで、超大規模な電磁界解析を必要とするミリ波レーダーの評価を高精度かつ高速に実施し、効率の良いミリ波レーダーの設計・開発を支援します。