CAEコラム
動解析における加振法 Vol.2 「慣性力加振法」
第二回はラージマスを使わないで加振加速度をコントロールしながら加振する方法です。特に表題に書いたような名称で呼ばれているわけではありません。本当は何か呼び方があるのかもしれません。やり方としては普通に荷重を与えるだけのごく普通の手法なので特に名前を付けることもないのかもしれません。
加振したいモデルを作成し、加振機で加振する部分(加振機に結合する部分)を拘束するだけです。つまり構造物を加振機にセットした状態のモデルを作成することになります。
実際の試験では加振機に結合した部分が振れるのですが、解析モデル上では拘束した部分は動きません。そこでどうするかというと、例えば水平方向に慣性荷重をかけて、それを定常的に振動させるのです。
これは足元を地面に固定されたた状態で立ち、前後や左右に定常的に方向が180度変化する重力がかかって体をゆすられるイメージです。乗り物に弱い人は考えただけで酔ってしまいそうです。
周波数応答解析では定義した静荷重は周期荷重として認識されます。慣性荷重も節点荷重や圧力荷重と同様に慣性荷重も周期荷重として認識されます。1Gで定常加振したければ1Gの慣性荷重を、2Gで定常加振したければ2Gの慣性荷重をかけるだけという実に簡単なやりかたで加振加速度のコントロールができます。
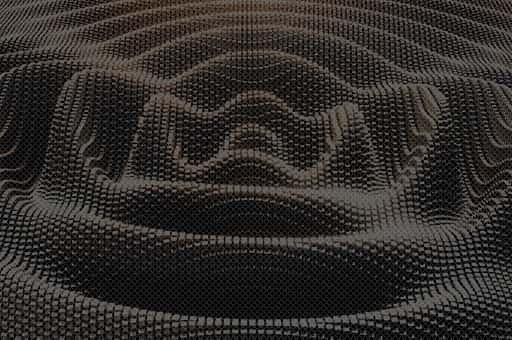
加振点が動かずに構造物だけが揺さぶられるのは何かイメージに合わないという人がいるかもしれません。しかし観測点を変えれば同じだということがわかります。
普通、観測者は振動する装置の外から見ています。したがって加振台が構造物を揺らすことになります。しかし観測者が加振台の上にいるとすれば、加振点は動かずに構造物に慣性荷重がかかって振れることになります。
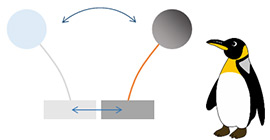
外から見ていると台ごと振れているが
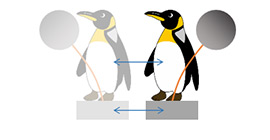
自分が台と一緒に振れていると
加振点は相対的に動いていないことになる
もし重力がかかった状態での振動状態を見たい場合はどうすればよいでしょう。下向きの重力荷重が必用ですが水平方向の慣性荷重と同時にかけると、上下左右に振動することになってしまいます。どうしてもやりたければ、下向きの荷重がかかった状態の解析を先に行ない、それを初期状態として水平方向の加振荷重を加えるという2ステップの解析になります。
さて、次回は加振点を止めて振動させる方法についてです。