
分野別の課題
SOLUTION CASE
車載用LiDARの設計
LiDARとは
LiDARとは「Light Detection and Ranging」の略で、レーザ光を用いたセンシング技術です。
原理的にはレーダーと類似しているので「レーザレーダー」とも呼ばれる事もあり、光源から物体にレーザを照射し、その散乱や反射光を計測する事で、物体までの距離や形状等を算出します。
レーダーに比べ光の波長は短いため、大気中の粒子など小さい物体の観測を行うことも出来ます。LiDARは昨今の自動運転技術の分野で注目されています。自動運転では距離や角度などの検出範囲や細かさに加え、刻々と変化する対象物の状況を検出できる速度などが高い技術レベルで要求されるとともに、実際の搭載に際しては小型化、温度変化対応、低コスト化などの課題もあります。
LiDARの方式にはToF(Time of Flight)方式やFMCW (Frequency Modulated Continuous Wave)方式がありますが、FMCW方式は感度が高い等のメリットがある反面、構成が複雑なコヒーレント検波を用いるため、実現例はまだ多くありません。
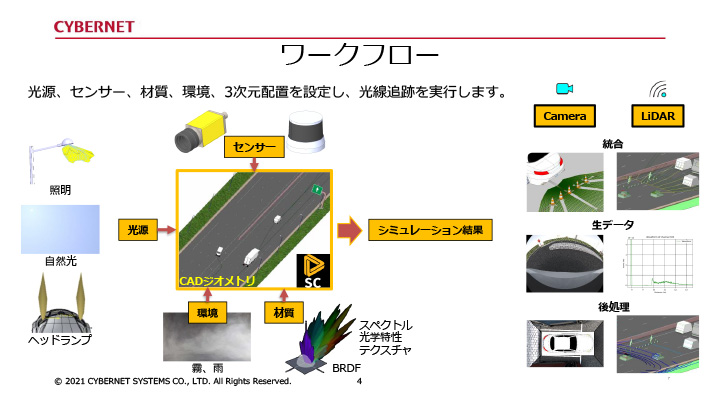
Optical Sensor Test をLiDARの設計に活用
Optical Sensor Test は、Ansys Speos の Add-On の1つです。
これを利用することで、LiDARの設計や様々な評価が可能になります。
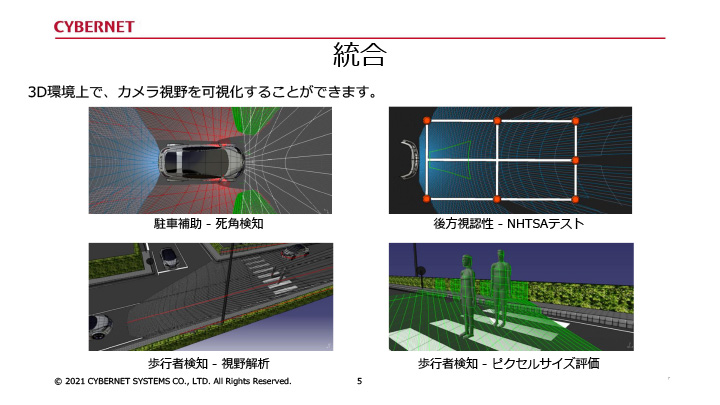
- 車載用のLiDARやカメラの取り付け位置や角度、検出範囲などを検証することができます。
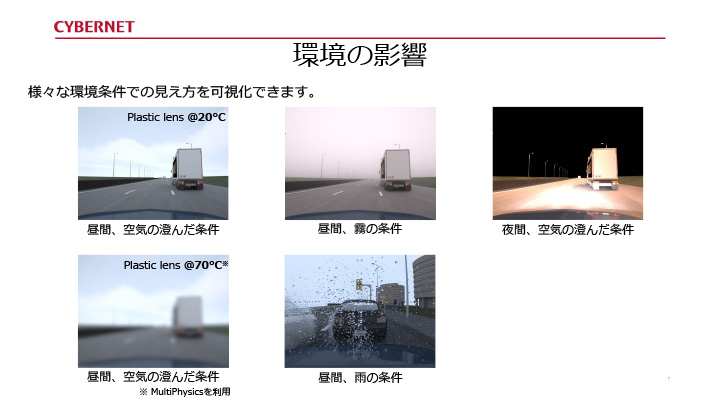
- 時間帯や天候などを考慮した様々な環境条件での見え方を可視化できます。
- 取得データを映像化することで、検出状況の経時変化を把握できます。
- 検出状況やその時間変化について、異なる方式のLiDARを比較することができます。せん。
資料サンプル
本資料をおすすめ
- LiDAR、車載カメラの設計開発をされている方
- 昼夜、雨、霧など時間帯や天候を考慮したい方
- 経時変化も評価したい方
※内容の詳細は、下記ボタンより資料ダウンロード頂けます。
光学に関するお悩みごとはありませんか?
サイバネットでは、光学受託設計・解析、システム開発、光学に関する教育・コンサルティングなど、幅広いサービスをご提供しております。