製品概要
Ansys AVxcelerate Sensors
リアルな車載センシングを動的に仮想検証でき、自動運転の走行テストシミュレーションが行えます。センサー特性を入力することで、光や電磁波による物理現象に即したセンシング、データ処理、制御、フィードバックがシミュレーションできます。
自動運転やADASに必要なカメラセンサー、LiDARセンサー、レーダーセンサーを評価できる環境を提供します。
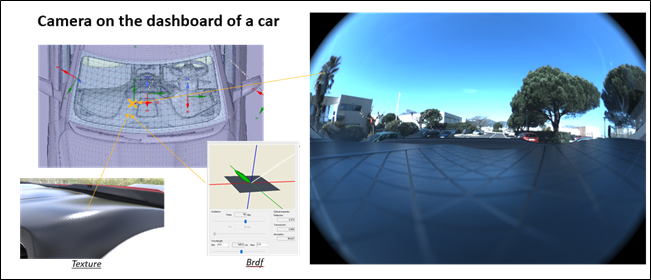
カメラセンサー
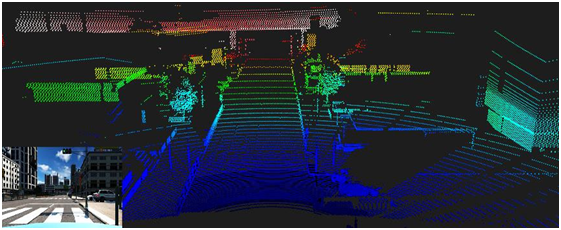 LiDARセンサー
LiDARセンサー
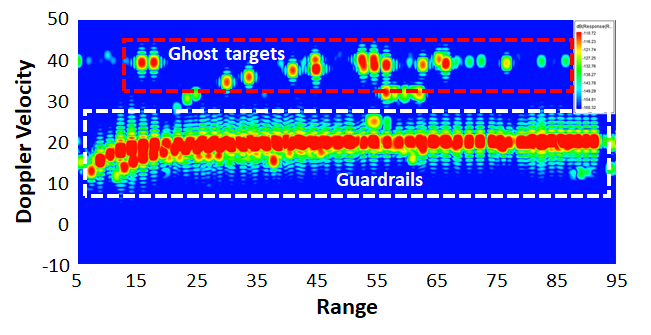 レーダーセンサー
レーダーセンサー
Ansys AVxcelerate Headlamp
自動車などのヘッドライトの配光パターンや制御を、シーンに合わせて動的にシミュレーションする環境を提供します。
仮想的な走路環境でのヘッドランプの性能を、物理ベースの光学シミュレーションを用いてリアルタイムに検証できます。ADBなどのインテリジェントなライティングシステムの開発や、性能に関するレギュレーションのチェックを簡単に行うことが可能です。
 夜間ヘッドランプシミュレーション
夜間ヘッドランプシミュレーション
特長
Ansys AVxcelerate Sensors
自動運転においては、走行環境の各種センシング情報と制御システムを組み合わせ、安全に走行、ナビゲートすることが求められます。また、運転の自動化は自動車だけでなく、VTOLやドローン、ロボット、パーソナルモビリティ、重機、船舶、航空機などでも進んでいます。このような自動運転システムが実環境で正確に安全に機能するかどうかは、多種多様な走行シーンに対応するセンシングシステムの開発が不可欠です。
Ansys AVxcelerate Sensorsでは、物理ベースの正確なセンサーシミュレーションを実現できます。カメラ、LiDAR、レーダーのセンシングモデルから得られるデータをもとに、自動運転における走行環境評価、運転制御、ユーザーインターフェースを開発できます。
コストのかかる実車プロトタイプ製造・実験走行に代わり、設計プロセスをスピードアップするため、Ansys AVxcelerate Sensorsはセンサーのテストと解析を仮想的に行えるシミュレーション環境を提供します。仮想空間では、リアルな走行シナリオを構築でき、レーダー、LiDAR、カメラセンサーの検知をMiL、SiL、HiLを踏まえて調査できます。
- リアルな走行シナリオ
- 走行環境の構築、ライブラリ
- レーダー、LiDAR、カメラセンサーによるマルチセンサーシミュレーション
- GPUレーダー対応
- センサーモデルのインポート、ライブラリ
- 地上検証データの活用
- HiL、MiL、SiL(Hardware/Model/Software in the Loop)接続
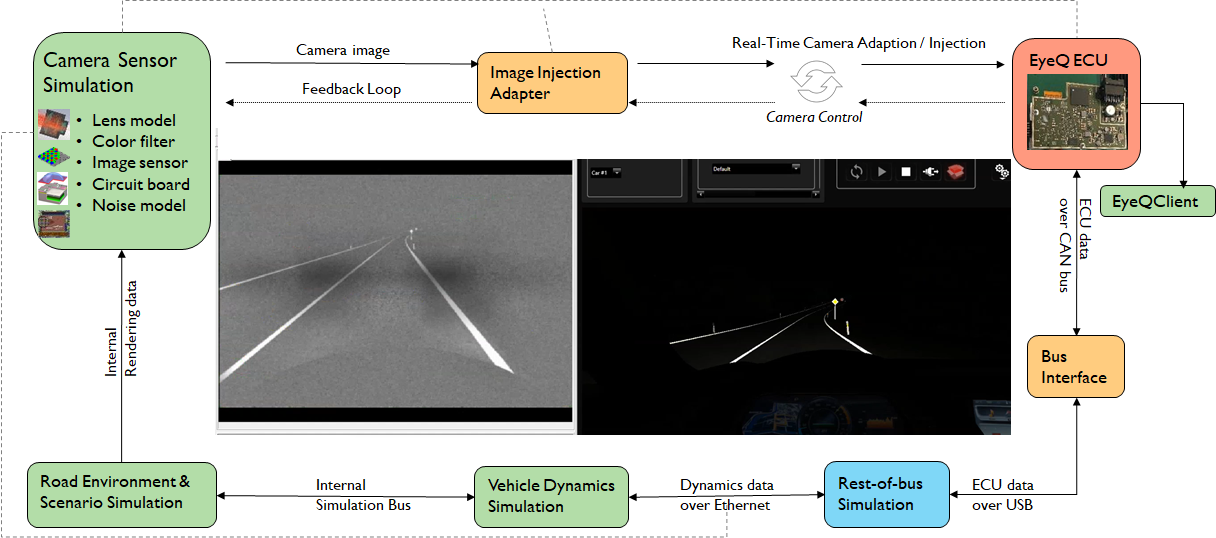 カメラHiLクローズドループシミュレーション
カメラHiLクローズドループシミュレーション
Ansys AVxcelerate Headlamp
今、インテリジェントヘッドランプ*が注目されています。このシステムの目的の1つは「周囲の環境を感知して適切な明るさを作り出すことで、すべてのドライバーの夜間運転の安全性を向上させること」です。また、「夜間の自動運転に対応するため、人手を介さず自動的にランプの明るさを調整し、光学式自動運転センサーの感度を向上させること」も必要です。
しかし、現実の世界で自動車が遭遇する光投影シーン、地形、道路状況は千差万別であり、インテリジェントヘッドランプの性能や安全性の検証は容易ではありません。実際の走行試験は時間とコストが大幅にかかるため実質不可能であり、仮想的なシミュレーションが必要になります。
ヘッドランプのシミュレーション環境であるAnsys AVxcelerateを利用することで、インテリジェントヘッドランプの設計と性能検証を仮想環境で行うことができます。これにより、自動運転システム開発において先進的なヘッドランプ設計を迅速、確実、低コストで実施できます。
* ADB(Adaptive Driving Beam、配光可変ヘッドランプ)やAFS(Adaptive Front Lighting System、配光可変型前照灯システム)、マトリクスビーム、ピクセルビーム、高機能LEDヘッドライトなど各社が開発を進める次世代型ヘッドランプ
- リアルタイムヘッドライトシミュレーション
- インテリジェントライティングシステムの開発
- ヘッドランプ投影性能の解析(測光解析、不快グレア評価)
- IIHS仮想レギュレーションチェックの実施
- ランプシステムのレーティング最適化
- カメラセンサー、C++/Simulinkプラグインによる制御法則開発
- マルチスクリーン+ドライビングシミュレーション
- ドライバー・イン・ザ・ループ(Driver In the Loop)
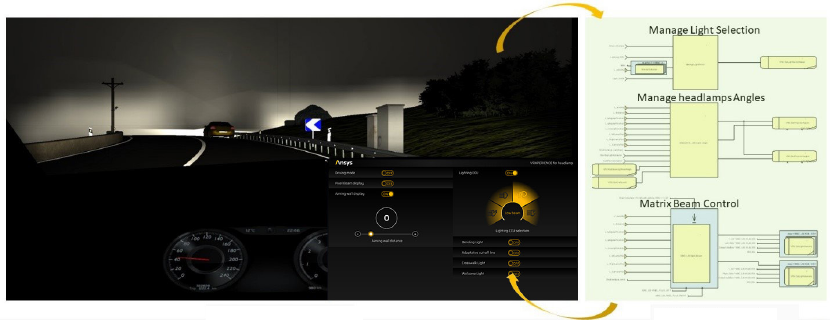 動的ヘッドランプシミュレーション
動的ヘッドランプシミュレーション
セミナー
セミナー情報
現在開催中のセミナーは以下よりご確認いただけます。