コラム
LiDARとは?仕組み・活用分野・課題と最新シミュレーション技術を徹底解説
LiDAR SOLUTION
自動運転やロボティクスの「目」として欠かせないLiDAR技術。
本記事では、LiDARの基本原理から測定方式、設計時の課題、CAEシミュレーションによる開発効率化まで、初心者にもわかりやすく解説します。
本記事では、LiDARの基本原理から測定方式、設計時の課題、CAEシミュレーションによる開発効率化まで、初心者にもわかりやすく解説します。
INDEX
- 光で距離を測るセンシング技術・LiDAR ― 原理と主な活用分野、市場動向
- LiDARの仕組み ― 測定方式と構成要素
- LiDARが抱える課題
- CAEシミュレーション ― LiDAR開発を支える仮想プロトタイプ
- LiDAR開発事例 ― 光学シミュレーションで見る応用例
TOPIC 1光で距離を測るセンシング技術・LiDAR ― 原理と主な活用分野、市場動向
近年、ADAS(先進運転支援システム)や建築業界などの幅広い分野で「LiDAR(ライダー)」という言葉を耳にする機会が増えています。LiDARとはLight Detection and Rangingの略称で、「光を使って距離を測る」センシング技術です。
原理はシンプルで、レーザー光を対象物に照射し、その反射光が戻ってくるまでの時間を測定することで距離を算出します。レーダーが電波を使うのに対して、LiDARは光を使った技術であり、電磁波の中でも波長の短い光を利用するため、レーダーよりも高い空間分解能と精密な3次元情報を取得できる点が特徴です。
LiDARの主な活用分野
LiDARは距離や形状を正確に知る必要がある様々な領域で利用されています。
自動運転・ADAS

車両の周囲をリアルタイムで3Dマッピングして歩行者・他車・道路形状を認識するなど、カメラやレーダーと組み合わせて安全運転を支援します。
ロボティクス・自律移動

倉庫ロボットや配送ドローンなどが障害物を検出しながら、自律的に・安全に移動するために活用されます。
インフラ・地形計測

橋梁やトンネル、送電線などの構造物点検、航空機やドローンからの地形スキャン(航空LiDAR測量)などに利用されます。
産業検査・製造

製品の形状検査など、ミクロン単位の精度が求められる場面で活躍。非接触で測定できるため、精密部品の品質保証にも適しています。

今やLiDARは、単なる距離計測技術ではなく、現実世界をデジタル空間に変換する技術として機能しています。カメラやレーダーといった他のセンシング手段と組み合わせることで、環境を立体的かつ定量的に把握できるようになり、機械が“周囲を理解する”ための基盤技術へと進化しつつあります。
今後は、自動運転車やスマートロボットだけでなく、スマートシティ、防災、農業、エンターテインメントなど、これまで想定されていなかった分野への展開も進んでいくと思われます。LiDARは、人と機械のインタラクションをより自然で安全なものへと変える、次世代センシングの中心的存在になっていくでしょう。
小型化・低コスト化が進むLiDAR市場
かつてLiDARは、研究機関や高級車など、一部の限られた用途でのみ使われる高価な装置でした。大型の光学系や高出力レーザーを必要とし、導入には数百万円単位のコストがかかることも珍しくありませんでした。しかし近年、半導体レーザー技術やMEMS(微小電気機械システム)ミラーの進歩によって、LiDARは急速に小型・低コスト化が進み、手のひらサイズで数万円台のモジュールも登場してきました。
この技術的進化により、LiDARは自動車やロボットだけでなく、前述の通り幅広い分野に搭載されるようになっています。近年では、3Dセンシングを活用した空間把握・安全管理・自動化の需要が急速に高まっており、LiDARはその中核技術として注目を集めています。

Fortune Business Insightsの推計によれば、2024年には約26.3億ドルだったLiDAR市場規模が、2025年には約30.1億ドル、2032年には96.8億ドルに達する見込みで、年平均成長率(CAGR)は18.2%にも上ると予測されています。自動運転技術を中心に、ドローン、都市インフラのデジタル化、そしてメタバースやARなどの新興分野が、さらなる需要拡大を後押ししています。
こういった背景から、新興メーカーから老舗企業まで、世界各国で技術革新と競争が活発に行われており、LiDAR市場は今後10年で飛躍的な発展が期待されています。
TOPIC 2LiDARの仕組み ― 測定方式と構成要素
LiDARの距離測定の原理は前述の通り、「光を照射して、その反射が戻ってくるまでの時間を測る」という非常にシンプルな考え方に基づいています。
光(レーザー)は秒速約30万kmで進むため、反射光が戻るまでのわずかな時間差を正確に計測することで、対象物までの距離を算出できます。このとき得られる情報を多数の点として空間にプロットすることで、物体や地形の3次元点群データ(Point Cloud)が生成されます。
たとえば、100m先の物体まで光が往復する時間はおよそ0.67マイクロ秒(100万分の0.67秒)。LiDARはこの極めて短い時間差を高精度に検出し、空間の立体構造を認識します。ほか、強度・波長の情報を統合的に解析することで、距離だけではなく対象物の形状までも認識することが可能です。
主な測定方式

- ToF(Time of Flight)方式
パルスレーザーを出射し、観測対象で反射して戻ってくるまでの時間で距離を測定します。構造が単純で扱いやすく、比較的低コストで実装できるため、現在市販されている多くのLiDARがこの方式を採用しています。身近な例だと、iPhoneのカメラ部分にもToFセンサーが実装されています。
一方で、外光(太陽光など)の影響を受けやすく、ノイズ対策が課題となります。
- FMCW(Frequency Modulated Continuous Wave)方式
周波数変調された連続波を利用した方式で、反射光の周波数シフトを利用することで、距離だけでなく速度も検知します。ToF方式よりも高感度でノイズ耐性があり、悪天候でも安定した計測が可能ですが、コスト面が課題になっており、現在も研究・開発が盛んに進められています。
構成要素とそれぞれの役割
LiDARは単一の装置ではなく、いくつもの光学・電子部品の協調によって構成されています。それぞれの要素が、精度・視野・速度といった性能を左右します。

①光源
主に近赤外レーザー光源が利用されます。波長は安全性と性能のバランスから、905nmや1550nm帯が一般的です。高出力でありながら人に無害な光を安定して出せることが重要です。
②投光光学系
レーザーを単に発射するだけでなく、レンズやミラーで方向を制御し、空間全体をスキャンします。
スキャン方式には、面全体を一度に照射するフラッシュ方式、モーター駆動でレーザーを走査するメカニカル方式、可動部を持たないソリッドステート方式(MEMS式やフェーズドアレイ式)などがあります。後者ほど小型・高耐久化が進み、次世代LiDARとして期待されています。
③受光光学系
反射光を集光して検出器へ導く部分です。高感度でノイズの少ない受光設計が求められます。広い視野角と迷光の抑制を両立するため、光学設計の工夫が欠かせません。
④信号解析
受信した信号を解析して距離・強度・速度などの情報を抽出し、3D点群データへ変換します。最近ではAIを用いたノイズ除去や物体認識も進化しており、LiDAR単体での空間理解能力が向上しています。ここで得られる情報が、ADASなどのLiDARを利用する各種アプリケーションへ入力されます。
TOPIC 3LiDARが抱える課題
ここまで見てきたように、LiDARは革新的技術として注目されていますが、光という繊細な物理現象を扱う技術ゆえ、環境条件や対象物の特性が計測精度に大きく影響を及ぼします。実際の設計・運用において直面しがちな課題を見ていきましょう。
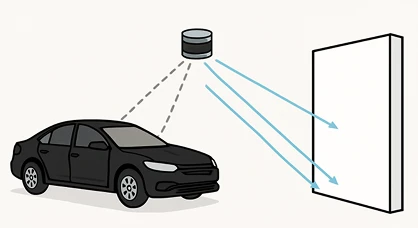
- 反射率の違いによる検出ムラ
LiDARの計測精度は、対象物の反射特性に大きく左右されます。たとえば、白い壁や金属のように光をよく反射する物体は容易に検知できますが、黒い車体やマット塗装面、ガラスなどは反射率が低く、レーザー光が吸収・透過されてしまうため検出が困難になります。これらの検出ムラは、特に自動運転や産業検査のように高い信頼性が求められる分野で問題となるため、現在は複数波長のレーザーを使った測定や、反射特性を補正するアルゴリズムの研究が進められています。
- 外光や天候による影響
LiDARが発する光は赤外線領域であるため、太陽光や街灯などの外光と干渉を受けやすいという性質があります。晴天下ではセンサーが強い背景光にさらされ、微弱な反射信号がノイズに埋もれてしまうことがあるほか、雨・霧・雪といった気象条件もレーザー光を散乱・吸収し、検出範囲の短縮や誤反射(ゴースト)の原因になります。可能な対策は光学フィルタによる不要光の遮断や、信号処理によるノイズ低減などで、ハードウェア/ソフトウェアの両面で改良が進められています。
- 測定精度・解像度とコストのトレードオフ
遠距離でもセンチメートル単位の距離精度を得るには高性能な光源・レンズ系・センサーが必要ですが、それぞれコストや設計難度、発熱とのトレードオフがあります。また、細かな物体を識別するための角度解像度(点群の密度)を上げるにはレーザー発振数や検出チャンネル数を増やす必要があり、データ量の増大や回路設計の複雑化を招きます。
複雑なLiDAR開発の課題を見える化 ― CAEによるフロントローディング
構成要素のそれぞれで解決すべき課題があると考えれば、従来の試作と実測だけではそのすべてを把握・対処しきれません。特に環境光・散乱・筐体内部反射などは、実験条件を再現するだけでも膨大な時間とコストがかかります。
そこで、Ansysの光学シミュレーションツールを活用した仮想プロトタイプによる検証が活躍します。LiDARの各構成要素の設計解析から、LiDARシステム全体のモデル化により、設計初期段階から実使用環境においてまで、定量的に検証・最適化できます。
大がかりなシステムだからこそ、仮想空間上で課題を見える化して対処していくフロントローディングを用いることで、試作回数を削減し、開発期間短縮と信頼性向上を同時に実現できます。
TOPIC 4LiDAR開発を支えるCAEを利用した仮想プロトタイピング
光学CAEツールを用いることで、LiDARの設計開発における上流から下流、各構成要素の設計解析からシステム全体の検証までをシミュレーションできます。これにより、設計初期から「どの条件で、どの要素が、どのように性能に影響するのか」を把握しながら開発を進めることが可能になります。
従来試作にかかっていたコストや期間を削減できるのはもちろん、環境光・温度・振動などの影響をシミュレーション内で再現することで、実使用条件に近い検証が行うことが可能になり、信頼性や安全性の向上にもつながると考えられます。
ここでは、LiDAR設計のどの部分に対して、どのようなシミュレーションツールが有効かを解説します。
光学設計解析ソフトウェアのご紹介

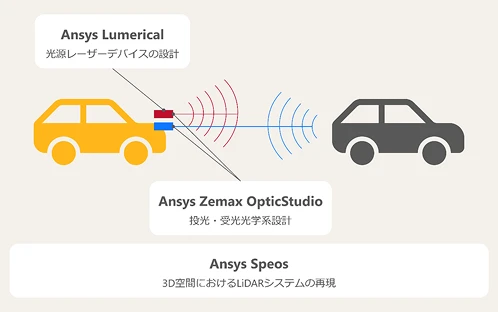
光源デバイスの設計:Ansys Lumerical
光源となるレーザーデバイスやシリコンフォトニクス構造を設計し、光の波動的な振る舞いをナノスケールで解析、最適なレーザー光源を設計できます。LiDAR用のフェーズドアレイの他、半導体レーザーなどの光源設計の最適化に利用されます。
投光・受光光学系の設計:Ansys Zemax OpticStudio
光の伝搬経路や結像を精密にシミュレーションできる光学設計ツールです。観測対象に意図した形でレーザーを照射するための投光光学系(レンズ)の設計や、ビーム伝搬解析、反射光をセンサーへ結像させるための受光光学系の設計にも対応しています。設計したデータをAnsys Speosへエクスポートして全体性能のシミュレーションに利用することも可能です。

3D仮想空間におけるLiDAR利用の再現:Ansys Speos
Ansys Speosでは、光源、光学系、センサーといった各種光学要素と、実際の照明環境の天候や物体表面の反射特性などを再現し、LiDARが “現実の環境で、システムレベルでどのように機能するか” をシミュレーションすることができます。取得した生データを利用したポストプロセッシング解析も可能です。
これら3つのツールを連携させることで、「光源デバイス → 光学系 → システム」という開発の流れをシームレスにつなぎ、実験では得られない包括的な洞察を得ることができます。
TOPIC 5LiDAR開発事例 ― 光学シミュレーションで見る応用例
サイバネットシステムではLiDARに関連したソリューション事例を複数ご提案しております。各事例の詳細や資料ダウンロードはリンク先をご参照ください。

【システム】事例資料:カメラ & LiDAR センサー機能を用いた車載用LiDARの設計
Ansys Speosのカメラ & LiDAR センサー機能を利用した車載用LiDARの設計事例です。
車載用LiDARやカメラの取り付け位置・角度、検出範囲などを検証することができるほか、時間帯や天候などを考慮した様々な環境条件での見え方を可視化できます。
【光源】事例資料:LiDAR用レーザーデバイスの設計
Ansys Lumericalによる、LiDAR用の光制御に用いられる光フェーズドアレイ型アンテナを設計および最適化する手法について説明しています。これはソリッドステート方式のひとつで、シリコンフォトニクスを基本構造として、高速かつ小型なデバイスを実現できます。この事例ではシリコンフォトニクスアンテナの基本構造の設計からLiDARの観測対象に最適なビーム分布解析などをご紹介しています。
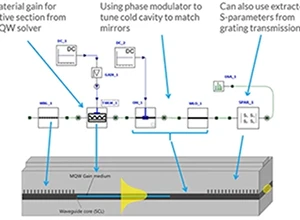
【光源】オンデマンド動画:レーザーデバイスの解析
本ウェビナーではLumericalによるレーザー解析をご紹介しています。Lumericalでは様々な用途に合わせたレーザー光源の設計解析に対応していますので、LiDAR用途においても様々なアプローチでレーザーを開発できます。
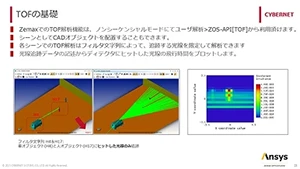
【レンズ】オンデマンド動画:LiDAR用のレンズ系の設計とToF解析
Ansys ZemaxOpticStudioによる、LiDARの投光・受光両光学系の設計とそれを用いたToF解析事例ウェビナーです。シーケンシャルモードで光源からの光をコリメートさせる投光レンズを設計し、別データとしてシーケンシャルモードで反射光がセンサーで結像する受光レンズを設計します。その後ノンシーケンシャルモードで両モデルを取り込み、LiDARとしての利用シーンを再現します。
今後の開発スピードを変える“設計手法の転換”

物理試作から脱却し、CAE上で完結できる設計環境を整えることは、開発スピードと品質の両立に直結します。 特にLiDARのようなシステム全体の整合性が重要なシステムにおいては、事前検証の精度こそが競争力となります。
「試作を重ねず、最短ルートで動作検証まで進みたい」
そんな企業様は、ぜひ弊社のシミュレーション支援をご活用ください。
設計から検証、導入までを一気通貫でサポートいたします。