
xILS
xILS とは
xILSとは、MILS(Model In the Loop Simulation)、SILS(Software In the Loop Simulation)、HILS(Hardware In the Loop Simulation)といった制御システム開発におけるシミュレーション検証手法を総称した呼び方です。各ステップは「設計モデル → 実装ソフトウェア → 実機ハードウェア」と段階的に進み、実機に至る前に段階的に妥当性を確認する仕組みを提供します。これにより、安全性と信頼性を確保しながら効率的に開発を進められるのが特徴です。
MILS・SILS・HILSの違い
制御システム開発では、モデルベース開発(MBD)の流れの中で MILS → SILS → HILS と段階的に検証を行います。
MILS(Model In the Loop Simulation)は制御器とプラントを数式モデルで構成し、アルゴリズムそのものの正しさを確認する段階です。実装を考慮する前の「理論上の検証」にあたります。
次にSILS(Software In the Loop Simulation)では、制御器をC言語など実際のソフトウェアコードに置き換え、プラントモデルと接続します。ここではモデルとコードの乖離や数値誤差の影響を確認できます。
最終段階のHILS(Hardware In the Loop Simulation)は、実際のECUを接続し、リアルタイム信号をやり取りしながら動作を検証する工程です。実機に近い環境で安全に試験できるため、最終的な品質保証に不可欠です。
このようにMILS・SILS・HILSは役割が異なり、段階的に組み合わせることで安全性・効率性・信頼性を確保した開発が可能となります。
xILSが求められる背景には、制御システムの複雑化と安全要求の高まりがあります。自動車であれば、エンジン制御やブレーキ制御、さらにはADAS(先進運転支援システム)のように高度な制御が増えています。
xILSは、開発期間の短縮と品質向上の両方の観点で利用されています。
xILSの実装に必要な知見
MILS・SILS・HILSといったxILSを実開発に導入するためには、以下のような幅広い知見が求められます。
モデルベース開発(MBD)の専門知識
制御アルゴリズムをモデル化し、コードへと正しく変換するスキルが不可欠です。
シミュレーション環境の構築力
MATLAB/Simulinkなどのツール活用に加え、リアルタイムシミュレーション環境の設計やチューニングが必要となります。
ハードウェアとソフトウェアの統合知識
ECUやマイコンといった制御ハードウェアとの接続、I/O信号の取り扱い、リアルタイム性の確保など、実機に近い条件を再現できる技術力が求められます。
このように、xILSを自社だけでスムーズに構築するには高い技術力と多分野にわたる経験が必要です。
もし社内に必要な人材やノウハウが不足している場合は、MBDエンジニアリングサービスをご利用いただくことをおすすめします。専門のエンジニアが、モデル設計からSILS・HILS環境構築、さらには検証プロセスの最適化までをトータルに支援いたします。
詳しくは下記の サービス資料 をご覧ください。
事例/活用例
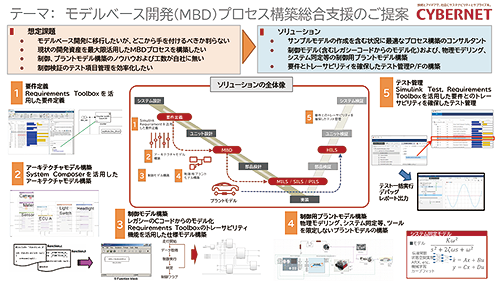
モデルベース開発(MBD)プロセス構築支援ソリューションのご紹介
MBD導入では手順不明やノウハウ不足が課題となります。サイバネットは40年の実績と研究経験を活かし、要件定義、制御・プラントモデル構築、RCP/HILS検証、テスト実行まで、MATLAB/Simulinkをベースにしたモデルベース開発を支援します。
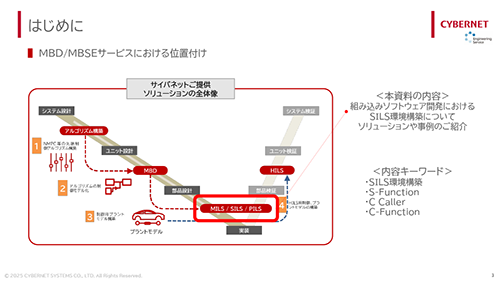
モデルベース開発におけるSILSの適用と環境構築手法 ~MATLAB/Simulinkで構築するSILS検証環境~
本資料では、組み込みソフトウェア開発におけるSILS(Software In the Loop Simulation)環境構築についてMATLAB/Simulink にて使用可能な手法や、シミュレーション実行速度の高速化事例をご紹介いたします。
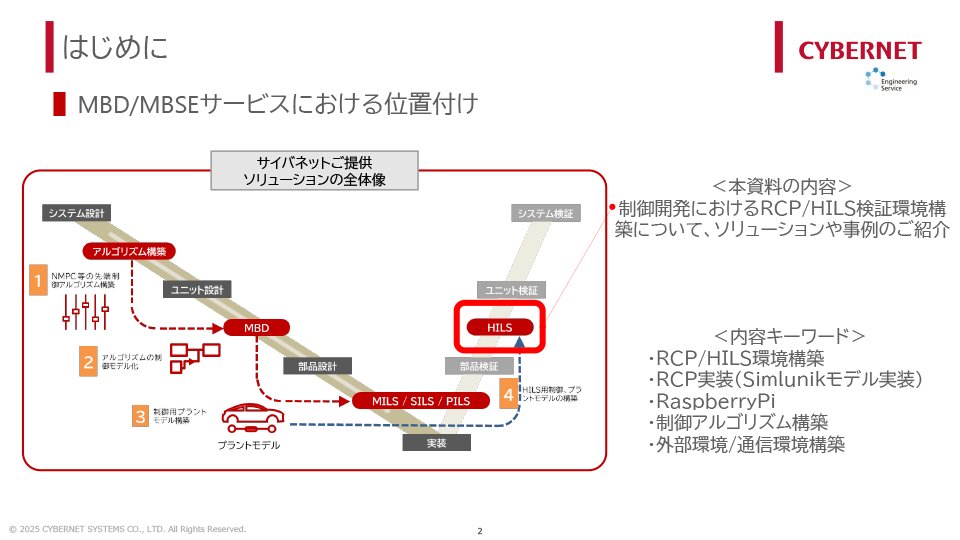
制御開発におけるRCP/HILS検証環境の構築と事例紹介
本資料は、制御アルゴリズム試作・最適化を行うRCP、制御システムの動作検証を行うHILSに着目し、それぞれの検証環境構築のソリューションや事例を紹介します。