資料ダウンロード
ロボットアーム制御から学ぶ!
3Dシミュレーションで実践するモデル予測制御(MPC)入門
Learning from Robotic Arm Control: An Introduction to Model Predictive Control (MPC) through Hands-on 3D Simulation
このようなニーズはありませんか?
- モデル予測制御(MPC)を理解したいが、実装方法が分からない
- 将来予測に基づく制御を学びたいが、どこから手をつければよいか迷っている - 非線形システムの制御に課題がある
- ロボットアームのような複雑な非線形挙動を、安定して制御できる方法を探している - 制御結果を3Dで直感的に確認したい
- 実験だけでは理解しづらい動作や制御挙動を、視覚的に検証したい - Unity・Simulink・MPCツールの使い分けが分からない
- 研究用・産業用それぞれでどの手法が適しているかを知りたい
こんな方にオススメします
- ロボットアーム制御や非線形制御を学びたいエンジニアの方
- SimulinkやUnityを活用した制御シミュレーションに興味がある方
- 研究開発部門で新しい制御手法を検討している方
- MBD/MBSE推進に向けて、制御モデルの高度化を目指す方
ロボットアーム制御とモデル予測制御(MPC)が求められている理由
ロボットアームのような多関節システムは、リンクの姿勢変化によって重力・慣性・遠心力などが常に変化し、強い非線形性を持ちます。
そのため、従来のPID制御では指定した軌道どおりに滑らかに動作させることが難しい場合があります。
また、実機のみで制御検証を進めると、
- 試行錯誤に時間がかかる
- 安全性の確保が難しい
- 再現性の高い評価がしづらい
といった課題が生じます。
こうした背景から、モデル予測制御(MPC:Model Predictive Control)を活用し、「未来の挙動を予測しながら適切な制御入力を選ぶ」方式が注目されています。
本資料では、3Dシミュレーションを使ってこのMPCを直感的に理解できる構成としています。
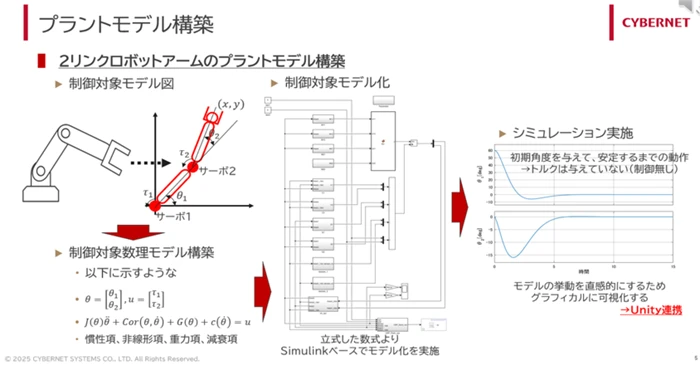
プラントモデル構築:2リンクロボットアームを例にしたモデリング
MPCを適用するには、制御対象がどのように動くかを表す「プラントモデル」が必要です。
2リンクロボットアーム(マニピュレータ)を例にして、プラントモデルを構築する方法を解説します。
モデル化では以下の要素を整理しています。
- 各リンクの長さ、質量、慣性モーメントの設定
- 各関節角度・角速度・トルクの関係式を導出
- 重力・慣性・コリオリ力・遠心力などを含む運動方程式の構築
さらに、この運動方程式をもとに、MPCで扱うための「状態空間モデル」へ変換します。
- 状態量と制御入力の定義
- 連続時間モデルを離散モデルへ変換
- 制御周期や予測ホライゾンを考慮したモデリングの注意点
これにより、ロボットアームが「次にどのように動くか」を予測しながら制御するための基盤が整います。
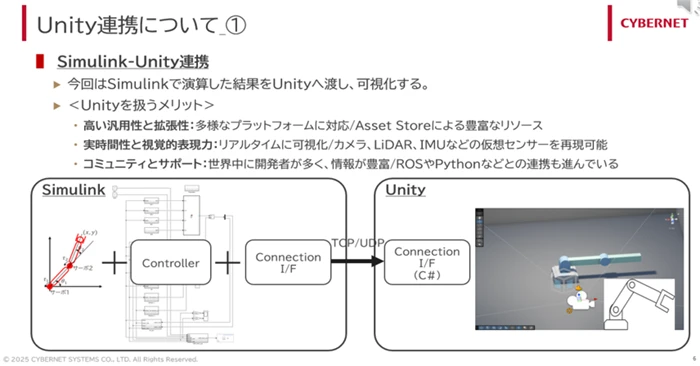
Unity連携:3Dシミュレーションでロボットアーム制御を可視化
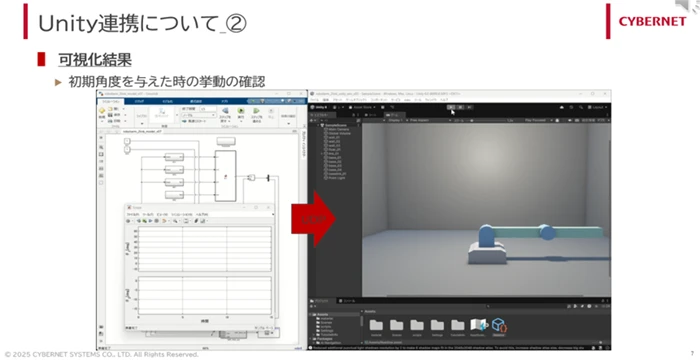
制御結果を数値やグラフだけで確認するのではなく、3Dシミュレーションでロボットの動きを目で見て理解できるよう、 Unity を使った可視化方法も紹介します。
Simulinkで制御モデルを構築し、そこで得られた関節角度などの結果を Unity に送信することで、
- ロボットアームの動作をリアルタイムに確認できる
- 軌道の誤差や制御の癖を直感的に把握できる
- 実機を動かす前に、仮想環境で挙動を安全に検証できる
- デモ・教育用途でも活用できる といったメリットがあります。
3DシミュレーションとMPCの組み合わせにより、「理論と実際の動きのギャップを埋めながら学べる」環境を構築できます。
*続きはダウンロードしてお読みください。