資料ダウンロード
モデルベース開発におけるSILSの適用と環境構築手法 ~MATLAB/Simulinkで構築するSILS検証環境~
Application of SILS and Environment Configuration Methods in Model-Based Development ~Building a SILS Verification Environment with MATLAB/Simulink ~
このようなニーズはありませんか?
- モデルベース開発を導入したが、実機レス検証がうまく進まない
- 開発初期段階での不具合検出率を高め、手戻りを減らしたい
- モデルと実装コードの一致性検証を効率よく行いたい
- 既存機能はレガシーコードを利用して、新規機能のみモデルを使ったハイブリッド開発を行いたい
こんな方にオススメします
- モデルベース開発(MBD)を活用した開発プロセスを推進している方
- コード検証やシミュレーションの高速化に課題を感じている方
- SILS環境の導入・活用を検討している制御・ソフトウェア開発者
- Simulinkを用いた開発に携わっており、最新の検証手法を取り入れたい方
モデルベース開発(MBD)におけるSILSの位置付け
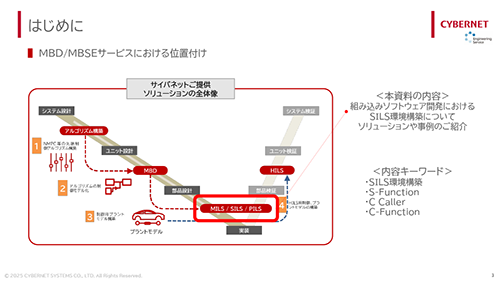
モデルベース開発(MBD)では、開発工程毎に様々なモデルを活用しながら開発を進めます。
本資料では、組み込みソフトウェア開発におけるSILS(Software In the Loop Simulation)環境構築についてソリューションや事例をご紹介いたします。
モデルベース開発(MBD)とは
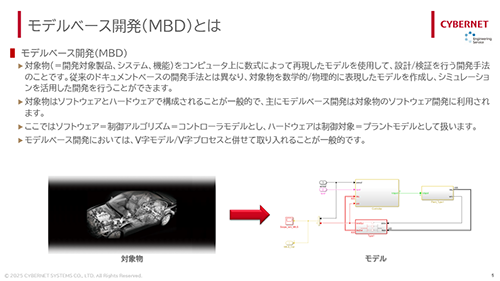
- 対象物(=開発対象製品、システム、機能)をコンピュータ上に数式によって再現したモデルを使用して、設計/検証を行う開発手法のことです。従来のドキュメントベースの開発手法とは異なり、対象物を数学的/物理的に表現したモデルを作成し、シミュレーションを活用した開発を行うことができます。
- 対象物はソフトウェアとハードウェアで構成されることが一般的で、主にモデルベース開発は対象物のソフトウェア開発に利用されます。
- ここではソフトウェア=制御アルゴリズム=コントローラモデルとし、ハードウェアは制御対象=プラントモデルとして扱います。
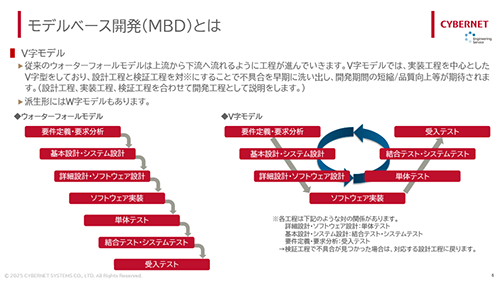
- モデルベース開発においては、V字モデル/V字プロセスと併せて取り入れることが一般的です。
- 従来のウォーターフォールモデルは上流から下流へ流れるように工程が進んでいきます。V字モデルでは、実装工程を中心としたV字型をしており、設計工程と検証工程を対※にすることで不具合を早期に洗い出し、開発期間の短縮/品質向上等が期待されます。(設計工程、実装工程、検証工程を合わせて開発工程として説明をします。)
- 派生形にはW字モデルもあります。
MILS/SILS/HILSとは
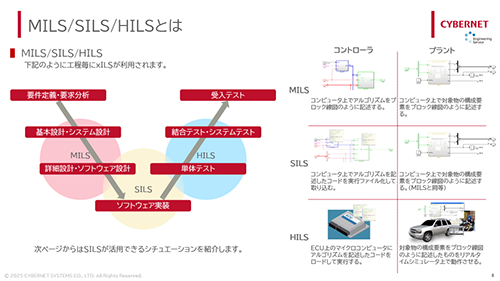
- モデルベース開発においてV字モデルを適用する場合、各工程でシミュレーションが実施されます。
その際、各工程で検証する観点が異なるため、使用するモデルが異なります。 - MILS は Model In the Loop Simulation の略で、コントローラ/プラント共にバーチャル環境で構築された開/閉ループシミュレーションによる検証を意味しています。コントローラモデルはSimulink等を利用してグラフィカルに設計されています。
- SILS は Software In the Loop Simulation の略で、MILSと同様にコントローラ/プラント共にバーチャル環境で構築された開/閉ループシミュレーションによる検証を意味しています。コントローラモデルはCコード等をコンパイルした実行ファイルとなります。
- HILS は Hardware In the Loop Simulation の略で、コントローラは実ECUとなり、プラントはリアルタイムシミュレータ上で動作します。この実ECUとリアルタイムシミュレータを組み合わせたリアル環境で構築された閉ループシミュレーションによる検証を意味しています。
- HILS とは逆にRCP ( Rapid Control Prototyping ) と呼ばれるコントローラにリアルタイムシミュレータ、プラントに実機を使用する検証もあります。
*続きはダウンロードしてお読みください。