
資料ダウンロード
複数ドローンの同時制御 ~ NSBを用いた1対多運航 ~
Simultaneous control of multiple drones ~ One-to-many operation using NSB ~
概要
様々な場面でドローンが活用されている中、物流や被災地の現場でも運用の場を広げつつあります。
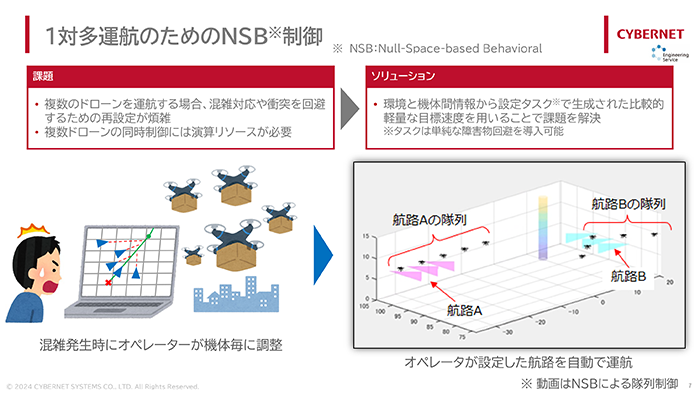
このような運用の現場では同一空域に多くのドローンが航行するため、運航リスクと急な航路修正など運航者の負担の増加が想定されています。
複数台のドローンが存在する密な空域に対する運航の解決策として、UTM※1や1対多運航※2などが必要とされています。
これらを集中的に管理する場合、機体数の増加に伴う処理時間の遅延により、運航への支障が懸念事項のひとつとされています。
この課題に対して、演算を分散させる手法が研究・開発されています。
本資料では、これらの課題解決に期待できる「NSB※3を用いた複数ドローンの同時制御」をご紹介いたします。
ご紹介の内容はタスクを達成する目標速度を生成する部分であり、速度への追従は既にお持ちの実績のある速度制御器を利用することを想定しています。
制御器をお持ちでない場合は設計を承ります。
※1:UTMとは
UAS Traffic Managementの略称です。UTMは同一の空域を飛行する複数のUASを安心・安全・効率的に運航するための管理手法のことです。
UASはUnmanned Aircraft Systemの略称で、操縦者が乗らずに飛行する航空機およびそれを制御する仕組みの総称です。
引用元:ドローンの社会実装に向けてドローン運航管理システムの機能構造を国際規格化 | ニュース | NEDO
(https://www.nedo.go.jp/news/press/AA5_101645.html)
※2:1対多運航とは
操縦者対機体の比率が 1対1を超える運航を指す。 物流の2024年問題や労働人口減少等の社会 問題の解決に向け、ドローンの利活用が期 待される中、運航にかかる人件費がボトル ネックになっており、1対多運航によるコス ト圧縮により解決が期待される。
引用元:ReAMoプロジェクト シンポジウム 実施者名:PwCコンサルティング合同会社
研究開発項目①(3)ドローンの1対多運航を実現する適合性証明手法の開発
(https://reamo.nedo.go.jp/library/2024/05/06_PwC_240510.pdf)
※3:NSB制御(Null-Space-based behavioral control)とは
自律移動ロボットなどに用いられる行動制御の手法です。この手法は、複数のタスクを達成するように設計されたものを単一の行動指令として構成することが特徴です。行動指令の構成は代数演算のため演算量の軽量化が期待されます。設定されたタスク間で対立が発生した場合、優先度の高いタスクを実行します。
資料掲載内容
- 複数ドローンの同時制御(1対多運航)の開発課題
課題例、課題の対象となりうる方
開発における課題例 - 複数ドローンの同時制御ソリューションのご紹介
1対多運航のためのNSB制御
NSBの効果と注意点
NSBのタスク事例と導入条件 - その他ドローン関連ソリューションのご紹介
*続きはダウンロードしてお読みください。