

資料ダウンロード
仮想道路でのエコドライブ
パワートレインの電動化は、燃費と排ガスの低減に役立つ革新的な車両コンセプトを模索する上で重要な要素です。ドイツのエンジニアリングチームは、Optimusと協力して、ニュルブルクリンクでのハイブリッド車(HEV)の仮想テスト走行を含む高度な最適化を行うことに成功しました。
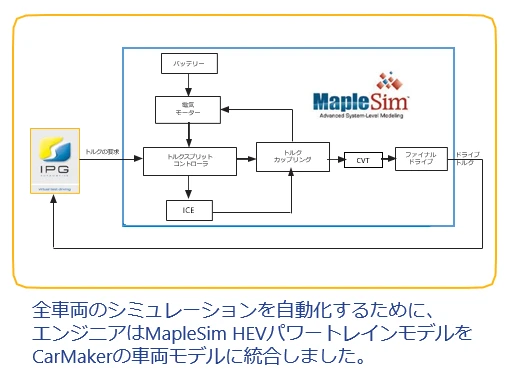
OptimusはCarMaker®と連動し、ユーザーの介入を最小限に抑えながら、関連するフルビークルシミュレーションを自動で実行しました。同時に、OptimusはCarMakerモデルに統合されたMapleSim HEVパワートレインモデルの設計パラメータに直接アクセスすることができます。このアプローチにより、自動車メーカーはハイブリッドパワートレインコンセプトを効率的に調査し、最適化することができ、より高度な自律性を提供する環境に優しい自動車を実現することができます。
効率的な開発プロセスの構築
ドイツのエンジニアは、革新的なアプローチにより、開発プロセスの早い段階でCarMaker環境にデジタルフルビークルモデルをセットアップしました。MapleSimで作成した外部パワートレイン・モデルを、FMU(Functional Mock-up Unit)としてフルビークル・モデルに統合しました。そして、Optimusのオープンインターフェース機能を使って、実車走行シミュレーションを管理すると同時に、パワートレイン・モデル内のバッテリー容量、運転戦略、その他のFMU関連設計パラメータに直接アクセスできるようしました。この革新的なアプローチにより、パワートレインのエネルギー消費量とビークルダイナミクス性能のバランスを取ることが可能になりました。
この車両モデルのバーチャルテスト走行により、エンジニアリングチームは、さまざまなパワートレインのトポロジーやコンポーネントを使用して、車両のコンセプトや運転戦略を検討することができました。関連するすべてのサブシステムを1つのデジタルモデルに早期に統合して車両性能を評価することで、複数の走行シナリオとドライバータイプを使用してサブシステムの相互作用を把握することに成功しました。
ハイブリッド電気自動車の仮想道路での走行
CarMakerで構築された非線形自動車モデルは、仮想道路やテストコースで走行すると、物理的な自動車の車両ダイナミクスと全体的な挙動を示します。操縦制御を備えた統合ドライバーモデルを用いて仮想道路上で仮想車両を操縦し、実走行条件下での車両全体の挙動を調査しました。運転戦略やパワートレインのトポロジーの最適化におけるドライバーの行動の影響を調査するため、エンジニアはディフェンシブドライバーとアグレッシブドライバーのモデルで比較しました。また、ニュルブルクリンクのノルドシュライフェとシュトゥットガルト周辺の市街地走行という2種類のルートを選択し、実世界の運転を表現しました。
ハイブリッドパワートレインコンセプトの多目的最適化
車両と駆動系は非線形性が高いため、多目的最適化手法のNSEA+が選択・適用されました。最適化の結果、総走行時間はわずかに短縮されましたが、総エネルギー消費量はディフェンシブドライバーで約40%、アグレッシブドライバーで約25%減少しました。 ニュルブルクリンク「ノルドシュライフェ」での最適化の結果、この種のサーキットでアグレッシブに走行するためには、小型バッテリーを搭載したハイブリッドパワートレインコンセプトが最もエネルギー効率が高いことが判明しました。
*続きはダウンロードしてお読みください。