

資料ダウンロード|分野別ソリューション
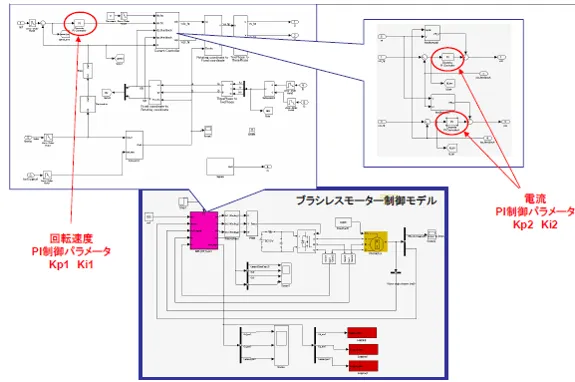
ブラシレスモータのPI制御パラメータ最適化
ブラシレスモーターをPI制御にてコントロールする場合、PI制御のパラメータ設定が問題となります。従来これらのパラメータを求める方法として、ステップ応答法や限界感度法などがあり、パラメータをある程度の範囲まで絞り込むことが可能ですが、最終的には技術者の知識や経験によりチューニングを行う必要があります。そこで、技術者の技量によらず最適なパラメータを求めるため、最適化アルゴリズムによりパラメータの決定を行います。 OptimusのMATLAB用ダイレクトインタフェースを使用し、MATLAB/Simulinkの解析を自動化します。
最適化アプローチの検討
初期設計における結果から、回転速度、d軸の電流、q軸の電流という3つの評価指標の現状値と目標値との差を改善したいとします。このとき、安易に多目的最適化を行うことは得策ではありません。多目的最適化は、目的関数が複数存在し、かつそれらがトレードオフ関係にある場合に利用します。この時点では回転速度の誤差と電流の誤差が競合関係にあるかは未知です。安易な多目的最適化は、非常に多くの計算量を必要とします。そこで、まず実験計画法や応答曲面法を実施し、回転速度と電流のトレードオフ関係、ならびに制御パラメータと回転速度/電流の誤差の関係性を把握します。
解析の自動化
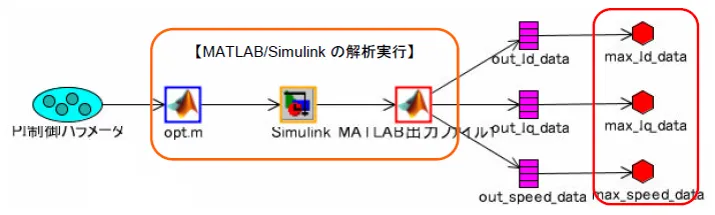
実験計画法によるサンプリングを行うため、MATLAB/Simulinkの繰り返し計算をOptimusで自動化します。まず、設計変数(回転速度および電流のPI制御パラメータ)を定義します。次に、MATLAB用ダイレクトインタフェースを利用して、MATLAB Driverの設定/Simulinkモデルの定義を行います。最後に、出力値(制約条件)を定義します。
問題分析
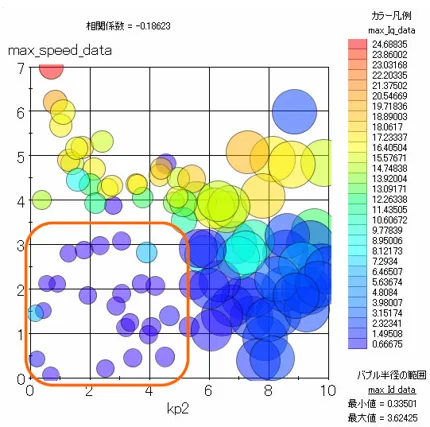
サンプリング結果の散布図により、3つの評価指標は競合関係(負の相関)にないため、それぞれ最小化することが可能であることがわかります。また、1つの目的関数にまとめれば単一目的最適化により解を求めることができます。右図のバブルプロットにより、電流のPI制御パラメータが小さいとき、すべての評価値が減少する傾向を確認できます。さらに、曲面モデル(最小2乗法)により、回転速度と電流の誤差に対する各制御パラメータの寄与度を把握できます。
3つの評価指標をまとめた最適化
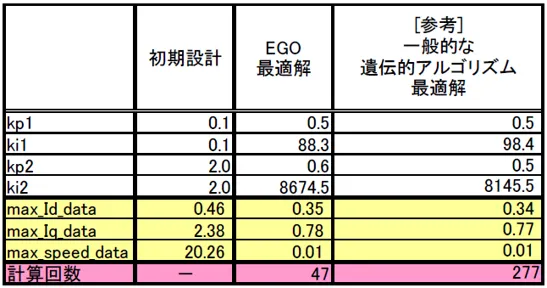
3つの評価指標は競合関係ではないため、1つの関数にまとめたうえで、回転速度の最大誤差および電流の最大誤差を最小化します。最適化アルゴリズムにはEfficient Global Optimizationを利用します。EGOは、不要な追加実験を行わないため、計算効率が非常に高い手法です。最適化により、回転速度の最大誤差が大幅に改善しました。これに伴い、相関性の高いq軸の電流も改善しました。
3つの評価指標それぞれの最適化
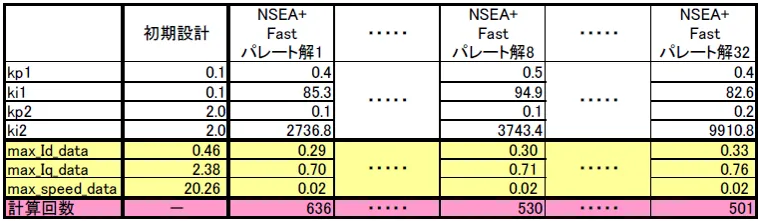
3つの評価指標をそれぞれ最小化することにより、回転速度の最大誤差および電流の最大誤差を最小化します。最適化アルゴリズムにはNSEA+を利用します。NSEA+は、多目的最適化手法のNSGA-Ⅱを改良した手法で、内部的に進化的アルゴリズム(Differential Evolution)を利用した手法です。760回の計算で32個のパレート解を算出しました。このように、多目的最適化によりパレート解は得られますが、設計空間全体の傾向としては競合関係ではないため、非常に細かい精度でのパレート解が要求されていない限り、単一目的最適化で充分に最適化することが可能と考えられます。
*続きはダウンロードしてお読みください。