


2024/04/23
Ansys
![[ CAE技術者を育てるオンライン学習ポータル ]EDURUNS](/ansys/assets/images/top/slider/image108.png)


About us
CAEの導入から立ち上げ支援、使いこなしまで一貫してサポート
1985年より、日本で初めてシミュレーションソフトを取り扱う代理店として、CAE とその関連サービスを提供してまいりました。
当社の社員の約半数がエンジニア、且つエンジニアの約3人に1人が博士・修士課程の出身者です。
機械系 CAE (構造物の応力、熱、振動、流体など)、制御系 CAE、光学/測定システムに至るまで、 Ansys の幅広いシミュレーション領域に対応できます。
Ansysとは
Ansys とは、世界中の企業・研究機関で導入されているマルチフィジックスCAEです。
CAEとは
CAE とは、コンピュータを利用した工学支援システムです。性能/機能のシミュレーションにより、試作や実験回数を削減できます。
Ansysの導入効果
Ansys の活用によって、大幅な作業時間削減、コスト削減を実現可能です。
サイバネットシステムが選ばれる理由
多様な専門性によって物理的/数学的視点で現象の本質を捉え、お客様の解析業務を支援いたします。
Case Studies事例
サイバネットシステムが取り扱うCAEの解析事例が、300件以上ご覧いただけます。
自社CAE導入、またはサイバネット「エンジニアリングサービス」での受託解析のご参考情報としてご活用ください。
Products & ServicesAnsys製品とサービス
Ansys製品のご紹介と、Ansysさらにご活用いただくための拡張ツールや技術トレーニング/サービスをご紹介します。
Pick Upピックアップ
サイバネットシステムがお伝えする
注目のピックアップコンテンツをご紹介
その他の資料・読み物を探す
CAE のあるものづくり
No.01
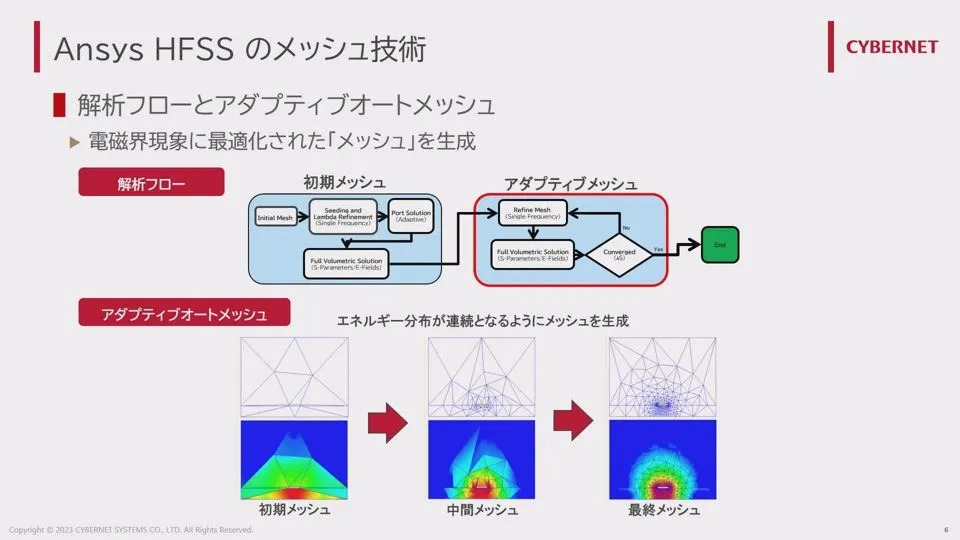
動画で学ぶ Ansys
No.02
Follow-up ServicesAnsysご利用中のお客様への
フォローアップサービスも充実
お客様が1日も早く Ansys を使いこなせるようになるよう、 CAE 技術トレーニングや教育プログラムをご提案し、使いこなすまでの期間短縮をお手伝いいたします。